Common entries
We have already seen that boxes can communicate with each other through links that are connected to inputs or outputs entries, following an event based communication logic. You have probably noticed that there are different types of links and entries in Choregraphe that correspond to different natures of signals and actions. In this section, we will describe these different entries and links.
First, we will look at a typology of the various entries you can use in Choregraphe.
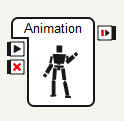
A box will always have at least 3 different entries. In fact, this is not always true as you can design a box with fewer entries or even no entry at all. But for now, let’s assume that a normal box has always a minimum of two inputs (on its left side) and one output (on its right).
The (almost) mandatory box inputs and outputs:
| Inputs |
Output |
|

onStart: this input can be found at the upper left of the box. When the onStart entry is stimulated by a signal, the box behavior is executed (if it is a flow diagram, the flow diagram is loaded and the signal transmitted, and if it is a timeline, the timeline starts to play).
|

onStopped: this output is at the upper right of the box. When onStopped is stimulated, it means that the box behavior has ended. The onStopped output can be linked to the inputs of other boxes: these inputs will be stimulated once the behavior executed in the previous box will have completely stopped. If you stimulate this output from a behavior keyframe or from the inside of the box, then the current box is automatically stopped before the upper level is warned. Use ponctual event if you want to transmit an event to the upper level without affecting the current level.
|
|

onStop: this input is represented by a red cross at the lower left of the box. When this entry is stimulated by an event, the behavior executed in the box is ordered to stop. Note that, in this case, it can take some time for a behavior to stop. For instance, if NAO is walking, the “Walk” behavior you want to stop will wait for NAO’s feet to be stable before stopping, so that the robot doesn’t fall down. This input is not available from the inside of a box (flow diagram or behavior keyframe), as it automatically stops everything.
|
|
These 3 entries are the most common entries in Choregraphe, but they are not the only ones.
Copyright © 2010 Aldebaran-Robotics - All rights reserved