The connection widget
Whenever you click on , you will see the following widget:
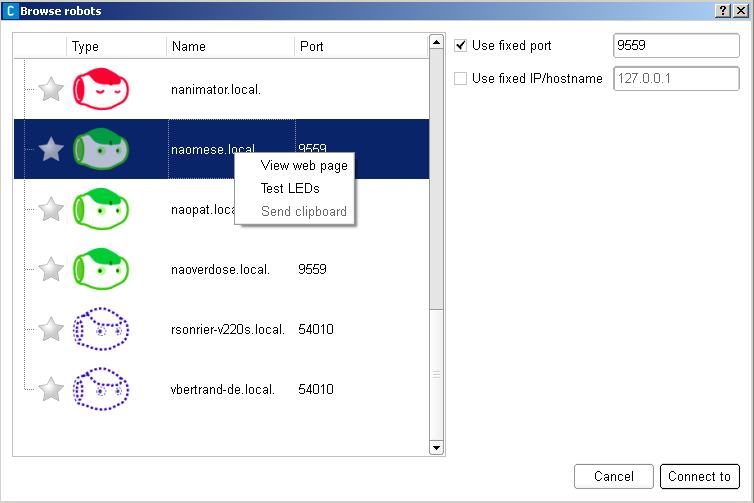
On the left panel, you can see a list of robots. These robots have 3 states:
| Icons | Descriptions |
|---|---|
|
A robot without a NAOqi running. The robot is in a state in which it should be impossible to establish a connection. If you have tweaked the robot, you may also see it in this state. You can force the connection to this robot by using the Use fixed port checkbox. It will try to resolve the connection using this port (9559 by default). |
|
A robot with a NAOqi running. You can test it by right-clicking on it to affect its face LEDs. A right-click can also leads to its webpage, where you can configure it (Wifi, name, NAOqi, ...). You can also send your diagram clipboard (selection of boxes and links) to another Choregraphe. To do that, you have to right-click on the robot the other Choregraphe is connected to, and click on "Send clipboard". The other Choregraphe will be warned that a clipboard has been sent, and can either refuse it, copy it to his clipboard, or directly paste it on his current diagram. If you want to connect to a robot, You can either double-click on it, or click on after having selecting the robot. |
|
A simulated robot (NAOqi running on a computer): you can access the same functions as an actual robot, except the LEDs one. |



| Note: | If you want to force the connection to a given IP and port, you can use the checkboxes on the right. Choregraphe will remember your last settings next time you execute it. |
|---|
Copyright © 2010 Aldebaran-Robotics - All rights reserved