主要功能
菜单栏:

- 通过(文件)菜单,可以创建新项目,打开已保存的项目,保存正在创建的项目,及退出Choregraphe。
- 通过(编辑)菜单,可以访问首选项窗口。“Motor speed”(电机速度)可以设定机器人上电机的速度。设定时,您可以移动滑动板、点击一个关键帧或是选择一个预定义的姿势(建议长时间连续使用时,速度限制在最高速度的75%以内,以免过早地损坏电机)。通过“User’s box libraries”(用户指令盒库)选项,您可以选择一个或数个保存在电脑里的指令盒库,以便在Choregraphe启动时进行加载。通过“Display”(显示), 您可以改变出现在曲线编辑器里的每个电机的图形颜色。
-
通过(连接)菜单,您可以:
- 打开命令列表,连接或断开机器人(真正的机器人或模拟器)。使用“播放”和“停止”按钮,让机器人开始或停止执行一个行为。当您创建的行为出现问题时,可以使用“警告”按钮,打开一个解释性窗口。这些按钮只有在您已经连接了机器人之后才能使用。当您想连接到一个本地NAOqi时,使用“连接本地NAOqi”选项。一般情况下,在运行Choregraphe时,会自动完成这一连接。
- 在机器人上传送文件:选择“File Transfer”(文件传送)选项,显示如下窗口:
选择您要传送的文件,然后点击(上传)或(下载)。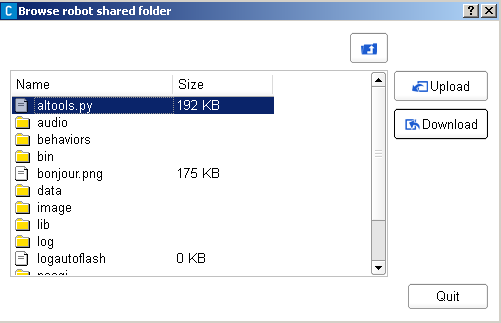
- 通过(行为)菜单,可以在机器人上定义一个在启动时会运行的默认行为。您还可以卸载默认行为,然后重新启动机器人(机器人在启动时就不会做任何动作)。使用“Stop all behaviors”(停止所有行为)按钮以停止所有在机器人上运行的行为。如果您在启动时或通过脚本执行了一个行为而又无法控制它时,就可以使用这个功能。
- 通过(三维视图)菜单,改变虚拟NAO窗口的视角。
- 通过(窗口)菜单,选择您想在工作表上显示的窗口或面板。
- 菜单栏下方的彩色按钮是您在Choregraphe中创建行为时会经常用到的功能快捷键。
按钮 功能 
创建、打开、保存一个项目 
连接机器人,播放、停止一个行为 
当某一行为的结构出现问题时,查看警告提示。 
在您点击“播放”后,进程栏显示行为的加载进程。 
控制/解除控制所有机器人的电机。该按钮有三种颜色,代表三种状态: > 绿色:所有电机都未受控制,机器人无法做动作。
> 黄色:半控制状态,取决于电机的刚度值。
> 红色:所有电机都受控制,机器人可以做动作。
Copyright © 2010 Aldebaran-Robotics - 版权所有