使用一个真正的机器人来定义关节值、创建动作
在上一个使用指导中,我们看到利用动作窗口,可以相当容易地从零创建一个动作。而Choregraphe中,还有一个非常直观的创建NAO动作的方法,那就是使用机器人来定义关键帧上的关节值。让我们来看一下如何操作。
保存头部关节值
-
打开Choregraphe,连接至一个真正的NAO机器人。
> 如果您改变了真正机器人的姿势,您可以看到虚拟的三维NAO也会随之改变。例如,举起NAO的胳膊。
您可以利用这一特点在动作时间轴上创建姿势关键帧。
- 例如,现在我们想让NAO在第一个关键帧里抬起头,双手保持下垂,操作如下:点击第一个关键帧,然后点击虚拟三维NAO,打开动作窗口。
- 将机器人的头部移至所需位置(控制按钮必须处于关闭状态),然后如下图所示,点击动作窗口上的两个记录按钮。
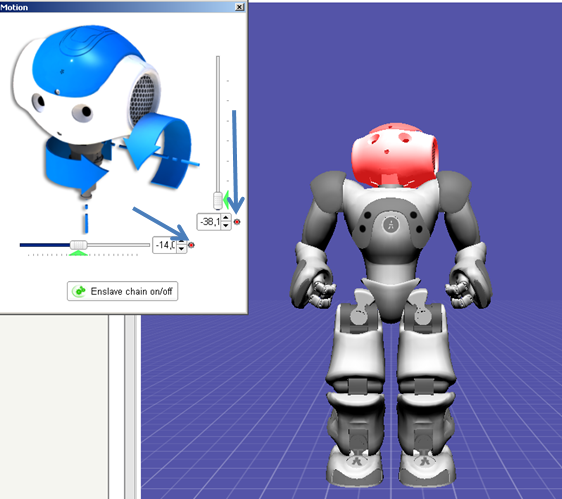
头部关节值就被保存在第一个关键帧里。
使用“在关键帧里保存关节值”选项,保存手臂关节值。
- 放下机器人的手臂。
注释: 控制按钮必须处于关闭状态。
- 点击动作窗口的。
机器人不动。
- 右击第一个关键帧,选择选项。
注释: 您可以通过这一方法保存NAO关节的数值,包括全身、头部、手臂和腿部等。
- 由于我们想保存的是手臂的关节值,所以点击。
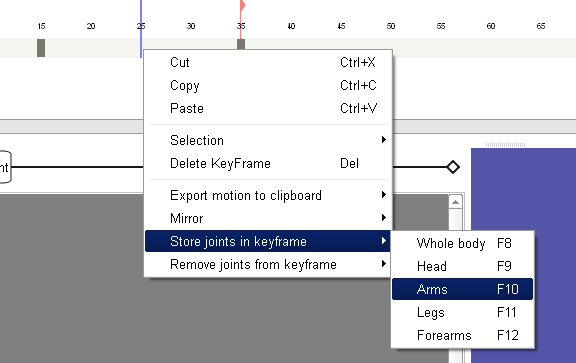
> 手臂关节值就保存在第一个关键帧里。
在第二个关键帧里举起手臂
- 左击动作时间轴来改变当前编辑帧(蓝色行)。
> 第二个关键帧就显示在动作时间轴上。
- 将机器人NAO的手臂移至所需位置。
注释: 控制电机选项必须处于关闭状态。
- 点击动作窗口上的。
> 机器人不动。
- 右击第二个关键帧,选择。
> 手臂关节值就保存在第二个关键帧里。
借助选项,我们只需点击一下,就可以在关键帧里保存8个关节的数值(每只手臂各4个关节)。
| 注释: | 右击一个关键帧时,通过选项,您可以很轻松地删除保存在一个关键帧里的关节值。您可以选择移除全身的关节值,或只是头部、手臂、腿部或前臂的关节值。 |
|---|
Copyright © 2010 Aldebaran-Robotics - 版权所有