NAO (脑) 三维图像面板
- NAO三维图像面板显示的是机器人的三维成像,用来创建及模拟行为。这个三维模型既可被看作是一个模拟机器人(如果您连接的是模拟器),也可作为您正在使用的真正NAO的虚拟镜像(如果您连接的是一个真正的机器人)。
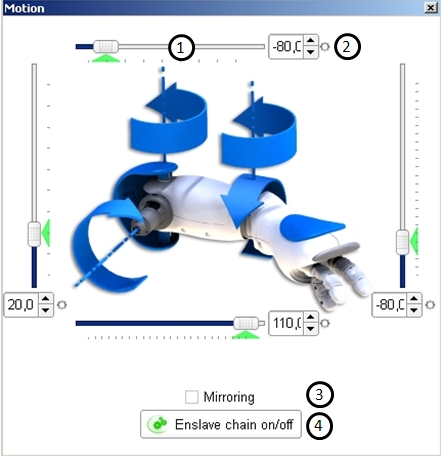
- 利用鼠标按键来缩放和移动虚拟模型。您还可以选择机器人的任意部位(头、手臂、躯干和腿部),只需点击相应部位即可。点击后,会打开一个类似下图的动作窗口:
- 您可以利用这个窗口来更改每个肢体的关节数值。在NAO模拟模型上可以直接看到修改结果。我们将在使用指导“从零开始创建动作”中更详尽地介绍动作面板的各种功能。
编号 说明 (1) 您可以通过滑动板来调节关节的数值,还可以在相应的文字框里填写数值。滑动板下方的绿色小箭头指示当前机器人关节的数值。 无论是使用滑动板还是文字框都会向机器人传递一个新数值,机器人会尽快回应您的命令。如果箭头呈蓝色,说明机器人尚未根据您的命令进行调整。如果您是使用鼠标发送命令,机器人会用1秒左右的时间调整到正确的位置。如果用时过长,那么机器人可能就出现问题,例如遇到障碍等。 (2) 使用Record(记录)按钮来保存您定义的数值。 - 如果按钮为灰色,可能这个关节值没有保存在选定的关键帧里,或是您未处在动作编辑模式。
- 如果为红色,就说明关键帧正在储存关节数值(即当前机器人关节值,它可能会与命令有所出入)。
- 如果按钮变灰,就说明您目前没有在编辑一个时间轴帧。
(3) 通过(镜像)选项,您可以在对称的肢体上完全对称地执行不同操作(发送命令,记录一个关节值等)。 (4) 通过 (控制全部 开/关)按钮,您可以控制或解除控制机器人所有的电机。当电机被解除控制时,移动滑动板对机器人没有任何作用。
Copyright © 2010 Aldebaran-Robotics - 版权所有