使用逻辑指令盒
本使用指导将通过一个实例介绍Choregraphe中两个逻辑指令盒的用法:Loop(循环)和Wait(等待)。在创建较为复杂的行为时会用到逻辑指令盒。Choregraphe里有两个现成的逻辑指令盒。您还可以创建自己的逻辑指令盒。
指令盒说明
| 指令盒 | 说明 |
|---|---|
|
“Loop”指令盒有5个输入项:3个常用输入项(onStart、onStop和onStopped),一个数字型并可多次激活的输出点(黄色),以及一个重置输入点,用来重新设置内部计数器。循环逻辑行为会增加内部计数器的值,并不断与预先设定的最大值进行比较,计数器值达到最大值时,激活输出点。这个逻辑指令盒适用于以一个给定的循环次数重复同一行为。打开指令盒参数面板来编辑循环次数。 |
|
“Wait”指令盒是一个单级脚本指令盒,有两个onStart输入点和一个onStopped输出点。该指令盒会等两个输入点都被激活时才激活其输出点。 |

如何将这两种指令盒结合在一起使用?
例如,您想让NAO在跳舞的同时点三下头,然后开始走路。创建这一行为最有效的办法就是使用这两个逻辑指令盒。
- 选择一个“Movement”(动作)指令盒,使用动作时间轴创建一个点头的动作。
> 参见使用指导从零开始创建动作。
- 拖放“Dance”指令盒(必要的话可以改变动作关键帧),把这两个指令盒连接至主要行为输入项。
> 点击,NAO会在跳舞的同时点一下头。
- 在行为中添加一个“Loop”指令盒,把内部计数器设定为3,然后将其连接至“Movement”指令盒。
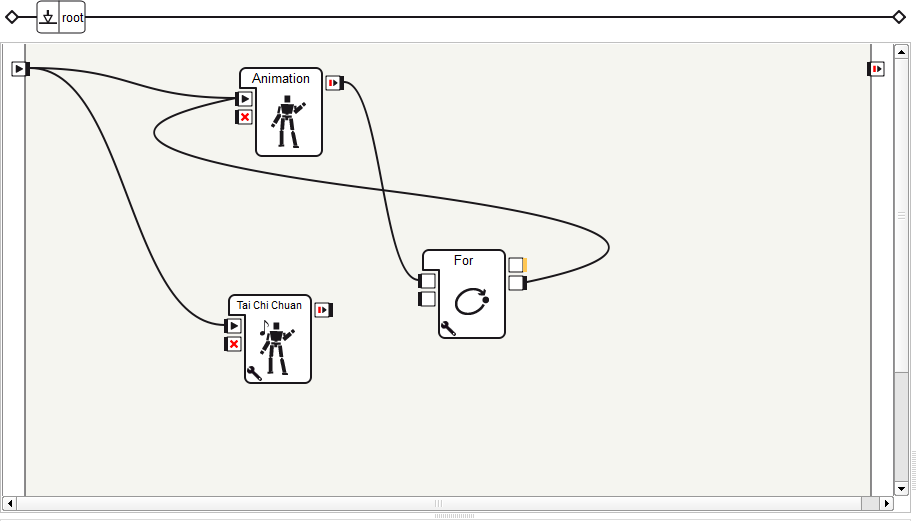
> NAO会在跳舞的同时点头三次。然后,我们还想让NAO在点头和跳舞之后开始走路。这很简单,只需使用一个“等待”指令盒即可。
- 将“Wait”指令盒拖放至流程图,将其连接至“Dance”和“Loop”指令盒。
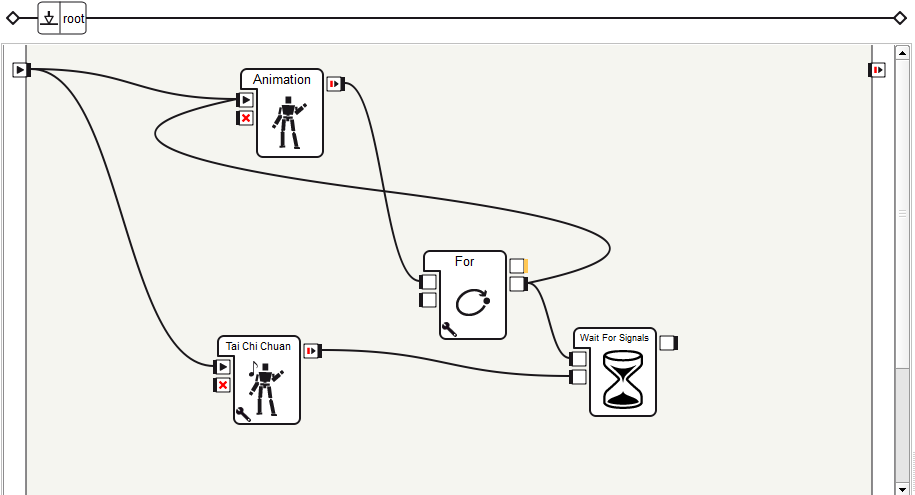
> 一旦两个输入点都被激活,“Wait”指令盒会激活其输出点。
- 在行为中添加“Walk”指令盒。
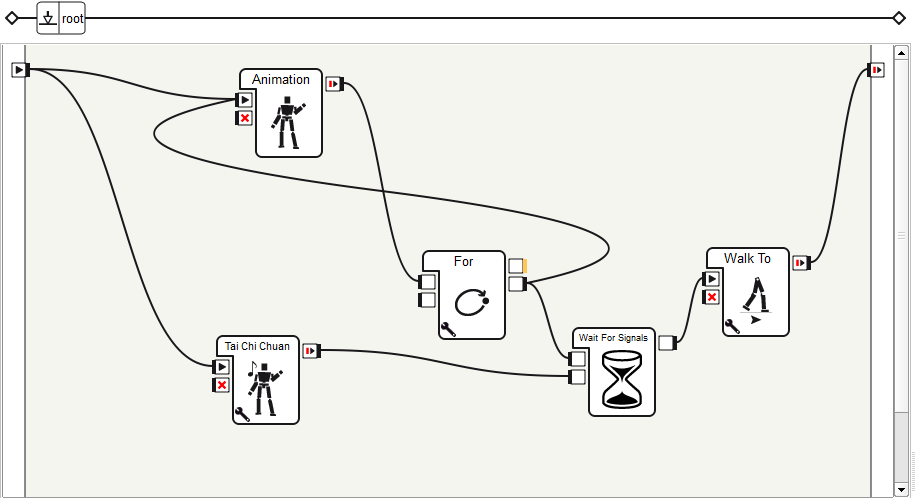
> NAO在停止点头和跳舞之后,开始走路。
Copyright © 2010 Aldebaran-Robotics - 版权所有