使用记录模式创建动作
现在,我们来看一下新的记录模式,可以直接记录关节,无需往返于机器人和鼠标之间!
打开记录模式
-
打开Choregraphe,连接至一个真正的机器人。

- 在Templates下拖拉Animation指令盒。双击进入时间轴,打开时间轴编辑器。
- 通过菜单栏或工具栏激活记录模式。您应该在树左侧面板上看到新的两列。
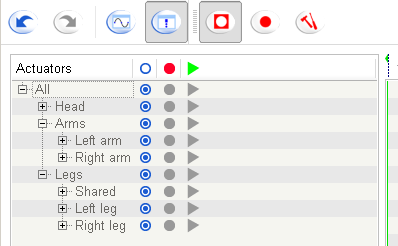
> 现在,一切就绪,您可以记录您的第一个动作。
记录动作
- 假设我们要创建一个新的舞蹈,NAO要舞动手臂。点击“手臂”一节前的“记录”一列,开始记录。
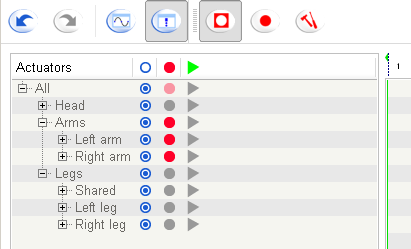
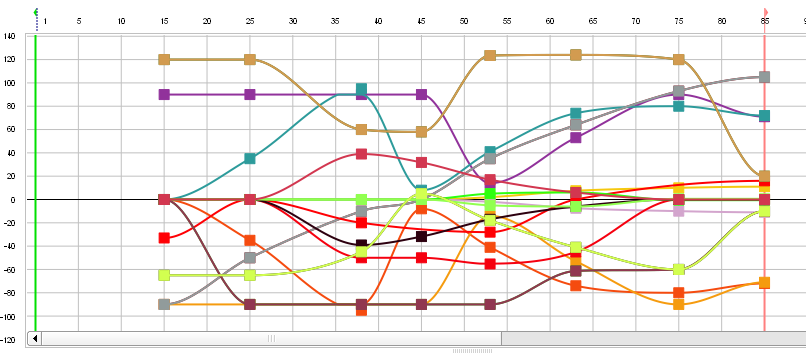
- 先确认手臂未受控制,然后点击菜单栏或工具栏的记录按钮,开始记录。随意移动机器人手臂,记录结束时,点击同一个按钮(现在变为停止按钮)。您应该获得一个如下所示的时间轴:

- 现在,我们要让机器人的头配合手臂的动作也动起来。只需取消选择手臂的“记录”列,选择“重播”列。然后,选择头部的“记录”列 。如果您正确控制了手臂,开始记录时,应该会重播手臂的动作,同时记录头部的任何动作。
注释: 通过这个功能,您可以保存NAO的关节值,关节包括全身、头部、手臂或腿部的关节。
- 现在,让我们改变记录的设定。打开记录模式设定,选择互动模式。机器人会监听其碰撞器。一个小面板会解释如何操作。 如果手臂和头部都正确地受控制,那么它们应该进入第一个姿势。现在,您可以将机器人的腿部移动至所需位置,使用右脚来控制/解除控制腿部,这样,您就可以测试创建姿势的稳定性。对动作满意时,点击左碰撞器,以此类推。
编辑记录
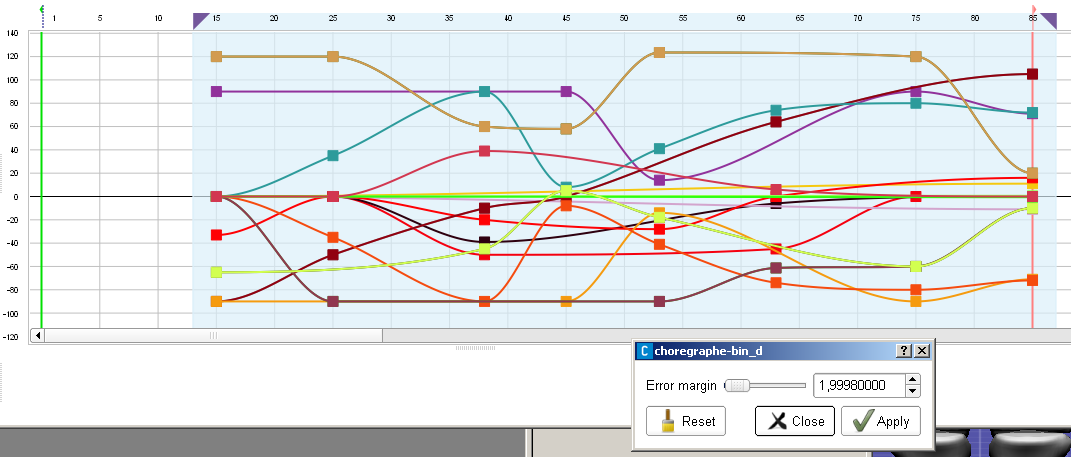
- 现在,您可能想编辑记录,调整动作。如果您打开曲线模式,您可能会比较吃惊,因为里面有许多关键帧!
- 编辑前,您可以使用简化方法,删除无用的关键帧。首先,选择一个关键帧范围。
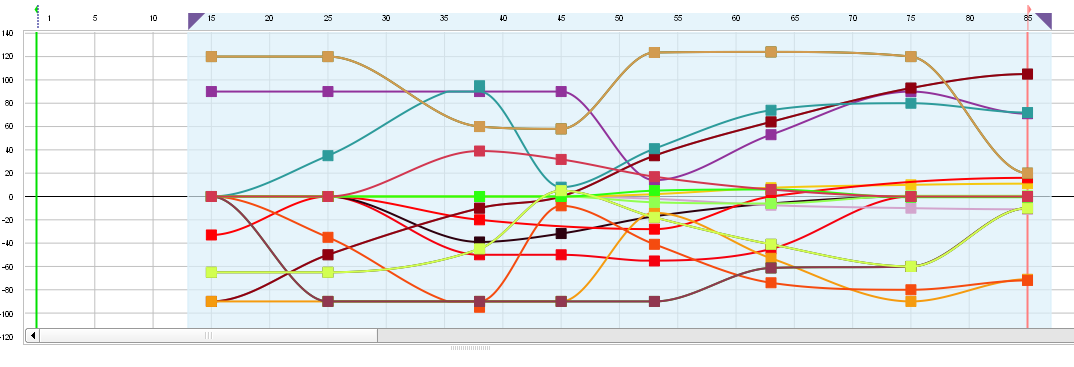
- 点击“简化”,试用默认值。您会看到不相关的部分现在是透明的。如果您接受简化,这些部分就会被删除。点击“关闭”。您会看到结果没有那么可怕了!至少,所有重复的关键帧都被移除,使整个动作更易读取和修改。
现在,您可以运用所有时间轴工具来编辑记录。
Copyright © 2010 Aldebaran-Robotics - 版权所有