连接选项的窗口小部件
每当您点击时,就会看到以下窗口小部件(widget):
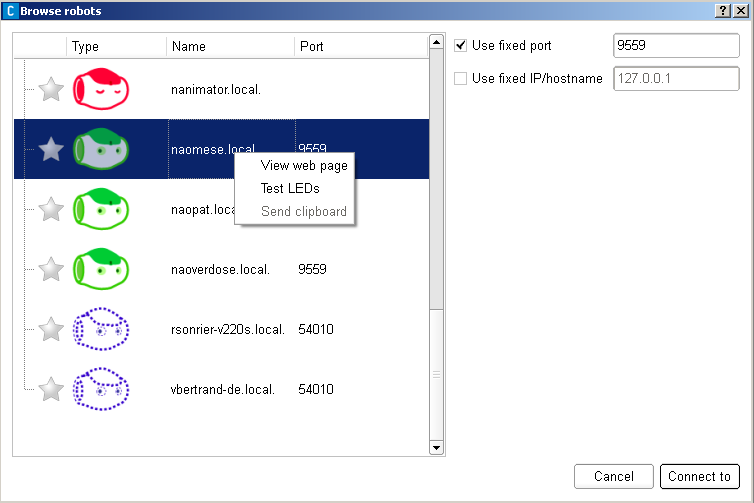
左边的面板显示的是机器人列表。机器人会处于三种状态:
| 图标 | 说明 |
|---|---|
|
NAOqi未运行的机器人,无法建立连接。如果您曾稍微调整过机器人,也会看到机器人处于这一状态。您可以使用复选框“使用固定端口”强行连接到机器人上。这一方法会使用该端口来试着解决连接的问题(默认端口为9559)。 |
|
NAOqi在运行的机器人。您可以通过右击该图标进行测试,机器人面部发光二极管会有反应。点击右键也可以进入机器人的网页,进行相关设置(无线连接、名称、NAOqi等)。 您也可以发送流程图剪切板(选定的指令盒和链接)至另一个Choregraphe。操作时,右击另一个Choregraphe连接的机器人,然后点击“发送剪切板”("Send clipboard")。另一个Choregraphe会被告知接到一个剪切板,并可以选择拒绝、复制到自己的剪切板上或是直接粘贴到当前的流程图上。 如果您想连接至一个机器人,您可以双击该机器人,或是选择机器人,然后点击。 |
|
模拟机器人(NAOqi在电脑上运行):您可以使用真正机器人上除发光二极管外的几乎所有功能。 |



| 注释: | 如果您想强行连接到某个IP地址和端口,可以使用右侧的复选框。Choregraphe会记录下最后的设置,供下次使用。 |
|---|
Copyright © 2010 Aldebaran-Robotics - 版权所有