偷走橡皮鸭
现在,您已经了解了如何使用代理程序和模块让机器人和电脑交流。下面,我们将使用Choregraphe进行动作编排,来解释机器人的三大原理:
- 找到并偷走橡皮鸭子
- 利用NAOmark,扔掉鸭子
- 向另一个机器人撒谎
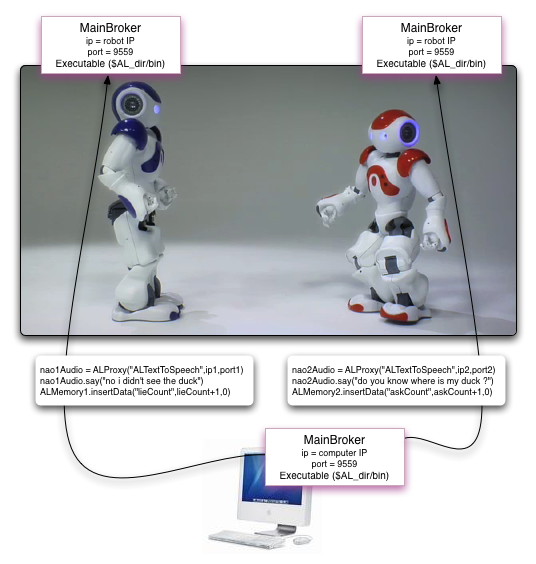
有许多方法可以实现这一系列动作。在这里,我们使用一个控制所有机器人的电脑来集中展示。另外,也可以使用一个NAO来代替电脑,指挥其它机器人。
假设robot1和robot2都有一个音频模块及一个内存模块,来存储各自的信息。如果没有这些模块,应用程序会引发可以捕获的异常。
Copyright © 2010 Aldebaran-Robotics - 版权所有