引言
概述
快速入门使用指导
NAOqi的功能
定义
自省
跨平台
跨语言
远程模块及本地模块
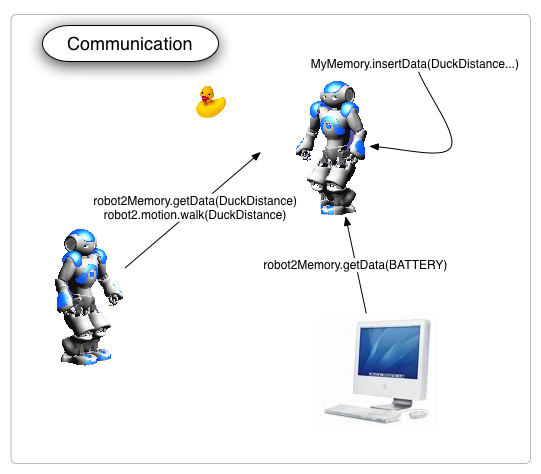
分布式树及信息交流
机器人编程方法
补充资料
安装
体系结构概述
文件体系结构
异常
智能指针
专门代理
顺序、并行调用:proxy.h
Python语言和语言选择
代理程序(Broker)
代理
模块
同步(Synchronization)
监控
线程
偷走橡皮鸭
实时考虑
Zeroconf / Bonjour: 寻找您的机器人
体系结构图
创建自己的主函数main
网络
Autoload.ini
ALValue
ALMemory
ALLogger
模块生成器(Module Generator)
更多信息
使用指导:如何在电脑或机器人上启动NAOqi
NAOqi程序选项
远程程序选项
机器人上的NAOqi
一个实时应用程序可以只是一个独立可执行档,或是机器人树、进程树或模块树等。无论您选择哪一个,调用方法都是一样的。通过IP地址和端口将一个可执行档连接至另一个机器人,并且可以通过与本地方法一样的方式来使用其它可执行档的所有API方法。NAOqi在快速直接调用(LPC)和远程调用(RPC)之间进行选择。