引言
什么是DCM?
体系结构概览
安装
DCM如何处理NAO的不同型号和版本
高层体系结构
概述
定时命令
定时命令插值的运算法则
低层体系结构
介绍
器件与子器件的定义
信息交流总线列表
器件类型
子器件类型
器件列表
关节名称
子器件列表
ALMemory中关键码和值的首选项文件“Device.xml /”的体系结构
BaseName
所有子器件的ALMemory默认关键码
所有器件的默认值
每个器件类型的ALMemory特殊关键码
每个子器件类型的强制性和特殊ALMemory关键码
机器人的配置关键码
首选项文件与子首选项文件
说明
可进行的操作
DCM体系结构
DCM启动序列
DCM.xml关键码
使用实例
Python语言范例
C++语言范例
DCM绑定方法
注释
getTime
getPrefix
Set
创建别名
setAlias (设定别名)
Preference(首选项)
Special(特殊方法)
DCM同步方法
onPreProcess和onPostProcess
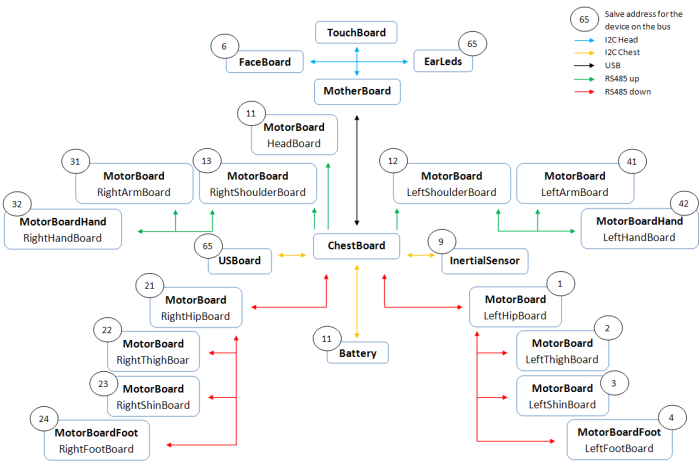
以下是机器人上所有器件的名称、类型和主线号(busNumber)。大部分都是电路板。
由于HeadBoard和Battery不在同一个主线上,它们可以有同样的地址。
新的三洋(Sanyo)电池的I2C地址为52。