Robotic programming methods
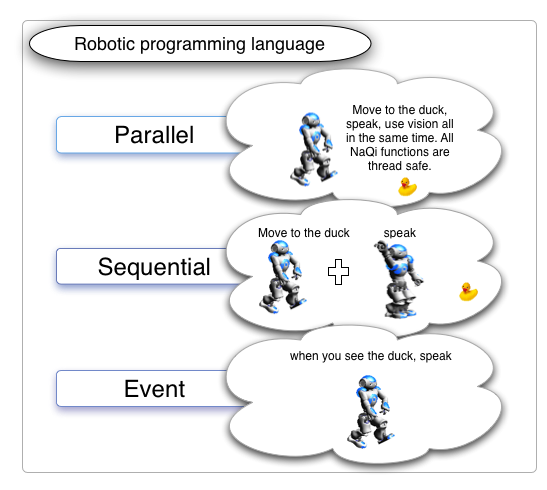
NAOqi offers three programming call methods:
- Normal (sequential) call is blocking, and the next instruction will be executed at the end of the call. All calls can raise an exception and should be encapsulated in a try catch block. Calls can have a return value.
- Parallel call is not blocking. It can raise an exception but runtime exceptions cannot be caught by the user. A parallel call doesn't have return value.
- Event call. User can create callback on events (position, recognition, sensors, variable value...). The callback will be executed in parallel at 50ms by default and require to check execution time and critical section (see thread). If the user callback has an execution time greater than 50ms, the event time policy should be increased.
Copyright © 2010 Aldebaran-Robotics - All rights reserved