Distributed tree and communication
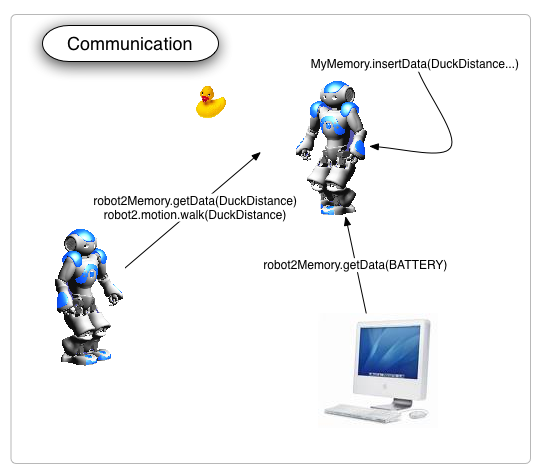
A real time application can be only one standalone executable or tree of robot, tree of processes, tree of modules. Whatever your choice is, the call methods are always the same. Connect an executable to another robot with IP address and port, and all the API methods from other executables are available in exactly the same way as with a local method. NAOqi makes the choice between fast direct call (LPC) and remote call (RPC).
Copyright © 2010 Aldebaran-Robotics - All rights reserved