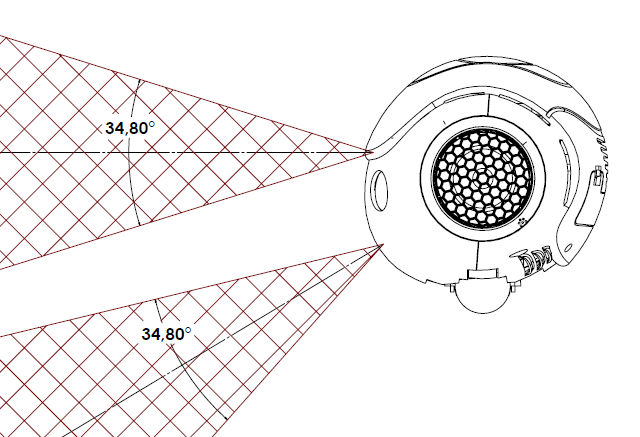
摄像头
机器人面部安装了两个相同的摄像头,分辨率为640x480,帧率为30帧/秒。它们可以用来识别视野里诸如球门、皮球等物体,位于下方的摄像头还可以帮助NAO更好地完成带球动作。
| 摄像头输出 | YUV422 |
|---|---|
| 视野 | 58度(对角线) |
| 聚焦范围 | 30cm至无限大 |
| 聚焦类型 | 固定聚焦 |
下面的图片是把摄像头发送的原始图片经过RGB转换得到的。

摄像头的位置,相对于头部链端点转换(End Transform)(参见ALMotion\Advanced\Model)
3.3:
3.2:
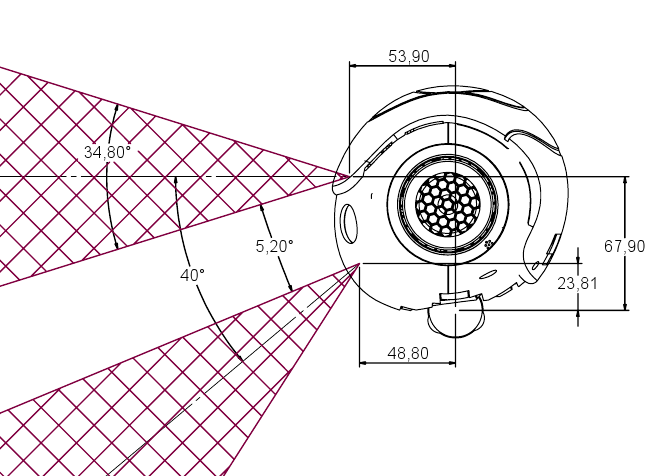
| 摄像头名称 | X(m) | Y(m) | Z(m) | WX(rd)[deg]* | WY(rd)[deg]* | WZ(rd)[deg]* |
|---|---|---|---|---|---|---|
| CameraTop | 0.0539 | 0.0 | 0.0679 | 0.0 | 0.0 | 0.0 |
| CameraBottom | 0.0488 | 0.0 | 0.02381 | 0.0 | 0.6981 [40.0] | 0.0 |
| 注释: |
* 我们采用“roll”(左右动)、“pitch”(前后动)和“yaw”(扭转)来表示角度。由此,使用T=rotZ(Wz)*rotY(Wy)*rotX(Wx)来构建与转动rotation(Wx,Wy,Wz)的协调转换。 |
|---|
Copyright © 2010 Aldebaran-Robotics - 版权所有