有关质量(mass)的信息
本节仅提供机器人右半边所有运动子系统的质量、重心和惯性矩阵。
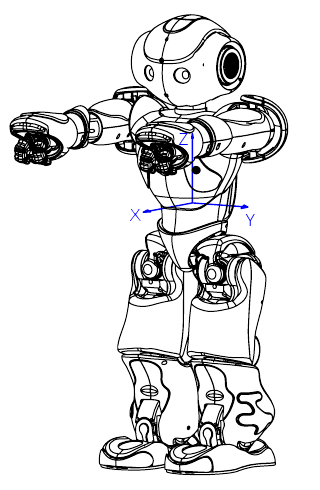
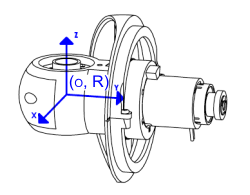
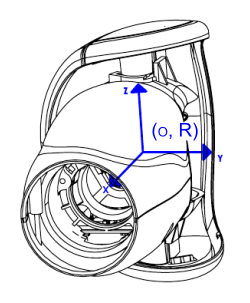
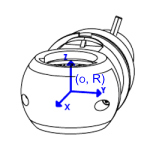
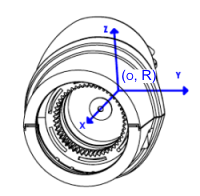
重心的位置相对于NAO主坐标系(x轴在前,y轴在左,z轴在上)。
惯性矩阵在重心上给出,并相对于NAO主坐标系。

NAO
| 装有电机的手的质量(Academics版)(g) | 4835.92 |
|---|---|
| 没有电机的手的质量(RoboCup版)(g) | 4698.52 |
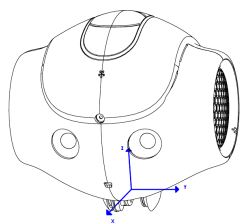
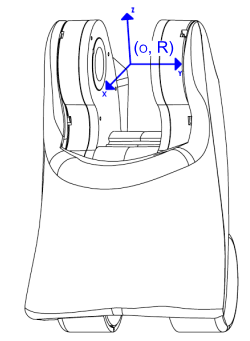
躯干
| 质量(g) | 1026.28 |
|---|---|
| 重心(mm) | X = -4.80 Y = 0.06 Z = 42.27 |
| 惯性矩阵(g*mm²) |
Ixx = 4879532.84 Ixy = -14285.91 Ixz = -195456.51 Iyx = -14285.91 Iyy = 4703606.98 Iyz = 22245.89 Izx = -195456.51 Izy = 22245.89 Izz = 1567135.20 |
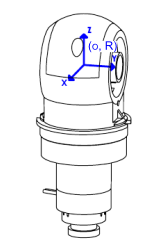
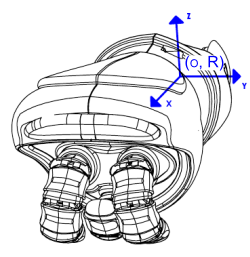
颈部
| 质量(g) | 59.59 |
|---|---|
| 重心(mm) | X = -0.03 Y = 0.18 Z = -25.73 |
| 惯性矩阵(g*mm²) |
Ixx = 62233.68 Ixy = 0.42 Ixz = 74.48 Iyx = 0.42 Iyy = 63244.31 Iyz = 104.16 Izx = 74.48 Izy = 104.16 Izz = 5494.62 |
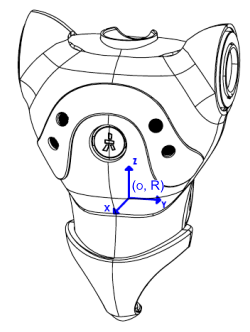
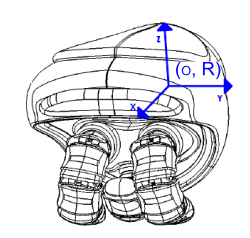
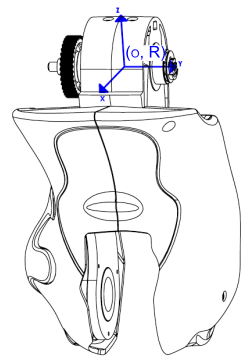
头部
| 质量(g) | 476.71 |
|---|---|
| 重心(mm) | X = 3.83 Y = -0.93 Z = 51.56 |
| 惯性矩阵(g*mm²) |
Ixx = 2088957.41 Ixy = 5490.94 Ixz = 113399.50 Iyx = 5490.94 Iyy = 1932222.63 Iyz = -28039.17 Izx = 113399.50 Izy = -28039.17 Izz = 822577.93 |
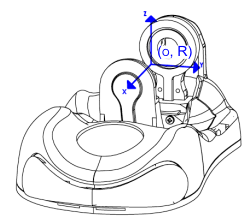
右肩
| 质量(g) | 69.84 |
|---|---|
| 重心(mm) | X = -1.78 Y = 25.07 Z = 0.19 |
| 惯性矩阵(g*mm²) |
Ixx = 71018.54 Ixy = -2024.58 Ixz = -17.13 Iyx = -2024.58 Iyy = 14049.20 Iyz = -44.10 Izx = -17.13 Izy = -44.10 Izz = 73144.67 |
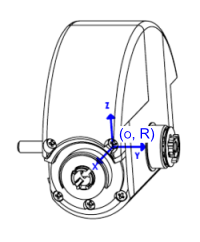
右上臂
| 质量(g) | 121.66 |
|---|---|
| 重心(mm) | X = 20.67 Y = -3.88 Z = 3.62 |
| 惯性矩阵(g*mm²) |
Ixx = 59317.93 Ixy = -1939.29 Ixz = 15645.03 Iyx = -1939.29 Iyy = 202210.58 Iyz = -3687.31 Izx = 15645.03 Izy = -3687.31 Izz = 184215.56 |
右肘
| 质量(g) | 59.59 |
|---|---|
| 重心(mm) | X = -25.73 Y = 0.01 Z = -0.20 |
| 惯性矩阵(g*mm²) |
Ixx = 5494.62 Ixy = -22.42 Ixz = -67.71 Iyx = -22.42 Iyy = 62247.89 Iyz = 5.59 Izx = -67.71 Izy = 5.59 Izz = 63230.10 |
装有电机的右前臂
| 质量(g) | 37.70 |
|---|---|
| 重心(mm) | X = 19.40 Y = -3.04 Z = 2.50 |
| 惯性矩阵(g*mm²) |
Ixx = 12711.01 Ixy = -1314.60 Ixz = 1436.26 Iyx = -1314.60 Iyy = 30569.01 Iyz = -206.86 Izx = 1436.26 Izy = -206.86 Izz = 29762.87 |
装有电机的右手
| 质量(g) | 143.14 |
|---|---|
| 重心(mm) | X = 32.41 Y = -2.68 Z = -2.72 |
| 惯性矩阵(g*mm²) |
Ixx = 56926.20 Ixy = -8222.13 Ixz = -11362.87 Iyx = -8222.13 Iyy = 272309.07 Iyz = 1817.80 Izx = -11362.87 Izy = 1817.80 Izz = 266113.99 |
没有电机的右前臂
| 质量(g) | 112.82 |
|---|---|
| 重心(mm) | X = 69.92 Y = -0.96 Z = -1.14 |
| 惯性矩阵(g*mm²) |
Ixx = 53951.90 Ixy = 5382.05 Ixz = 3560.87 Iyx = -2163.70 Iyy = 230776.22 Iyz = -47.22 Izx = -5465.34 Izy = -47.22 Izz = 227897.26 |
右骨盆
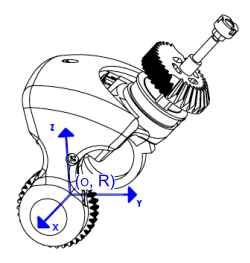
| 质量(g) | 72.44 |
|---|---|
| 重心(mm) | X = -7.17 Y = 11.87 Z = 27.05 |
| 惯性矩阵(g*mm²) |
Ixx = 90644.95 Ixy = -4888.19 Ixz = -12219.25 Iyx = -4888.19 Iyy = 106657.80 Iyz = 27838.20 Izx = -12219.25 Izy = 27838.20 Izz = 67428.59 |
右髋
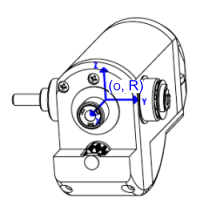
| 质量(g) | 135.30 |
|---|---|
| 重心(mm) | X = -16.49 Y = -0.29 Z = -4.75 |
| 惯性矩阵(g*mm²) |
Ixx = 27913.09 Ixy = 49.82 Ixz = 5309.68 Iyx = 49.82 Iyy = 101469.05 Iyz = 0.49 Izx = 5309.68 Izy = 0.49 Izz = 92093.58 |
右大腿
| 质量(g) | 397.98 |
|---|---|
| 重心(mm) | X = 1.31 Y = -2.01 Z = -53.86 |
| 惯性矩阵(g*mm²) |
Ixx = 1665589.85 Ixy = 432.51 Ixz = -82505.12 Iyx = 432.51 Iyy = 1624996.86 Iyz = 31742.81 Izx = -82505.12 Izy = 31742.81 Izz = 304928.52 |
右小腿
| 质量(g) | 297.06 |
|---|---|
| 重心(mm) | X = 4.71 Y = -2.10 Z = -48.91 |
| 惯性矩阵(g*mm²) |
Ixx = 1180337.82 Ixy = 305.42 Ixz = -40171.04 Iyx = 305.42 Iyy = 1129278.11 Iyz = 35736.39 Izx = -40171.04 Izy = 35736.39 Izz = 193490.09 |
右踝
| 质量(g) | 138.92 |
|---|---|
| 重心(mm) | X = 1.42 Y = -0.28 Z = 6.38 |
| 惯性矩阵(g*mm²) |
Ixx = 38825.78 Ixy = -49.42 Ixz = -2213.21 Iyx = -49.42 Iyy = 72115.79 Iyz = 6.74 Izx = -2213.21 Izy = 6.74 Izz = 53519.87 |
右足
| 质量(g) | 163.04 |
|---|---|
| 重心(mm) | X = 24.89 Y = -3.30 Z = -32.08 |
| 惯性矩阵(g*mm²) |
Ixx = 267598.00 Ixy = -5927.18 Ixz = -137299.18 Iyx = -5927.18 Iyy = 643148.36 Iyz = 18697.69 Izx = -137299.18 Izy = 18697.69 Izz = 526497.38 |