质量信息
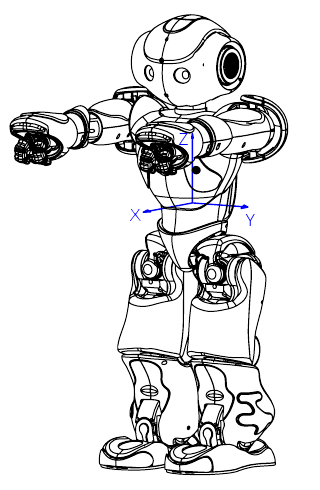
在本页,您可读到有关3.3版NAO机器人右侧每一个固体(S)的质量、质心与惯性矩阵的细节信息。
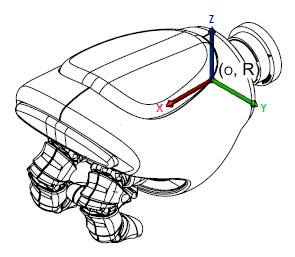
描述质心位置与惯性矩阵时,对应于当前固体的本地坐标系(S) (o, R)。
在描述所有固体(S)与本地坐标系时,对应于零点姿势:即双腿笔直且双臂向前平伸站立。

NAO
| NAO H25 (g) | 4996 |
|---|---|
| NAO H21 (g) | 4879 |
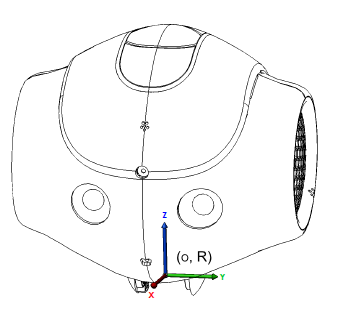
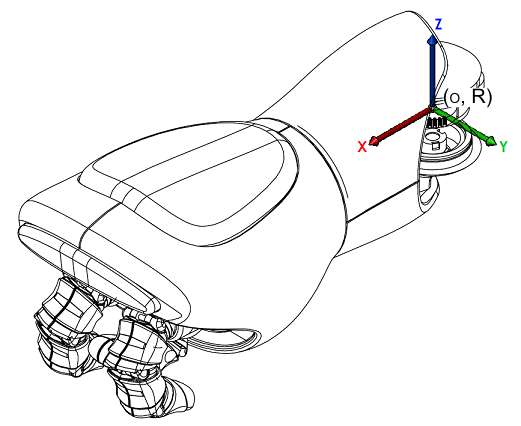
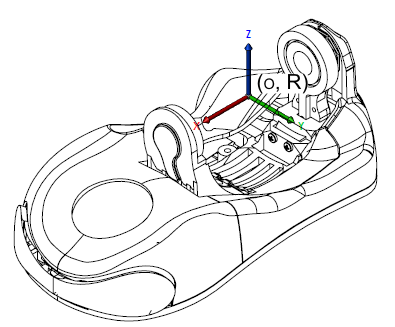
躯干
| 质量(g) | 1039.48 |
|---|---|
| 重心(mm) | X = -4.15 Y = 0.07 Z = 42.58 |
| 惯性矩阵(g*mm²) |
Ixx = 4967419.76 Ixy = -12473.98 Ixz = -164468.14 Iyx = -12473.98 Iyy = 4791352.46 Iyz = 24776.69 Izx = -164468.14 Izy = 24776.69 Izz = 1597848.29 |
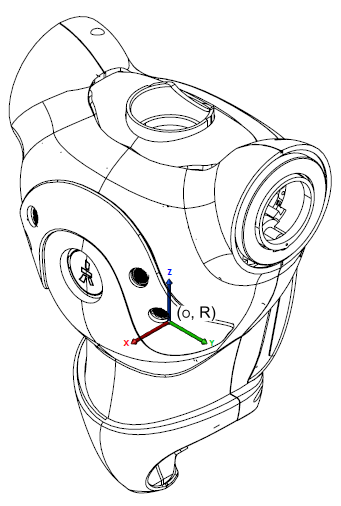
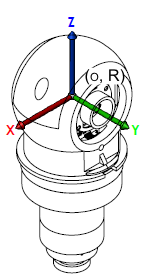
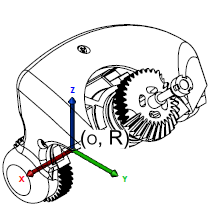
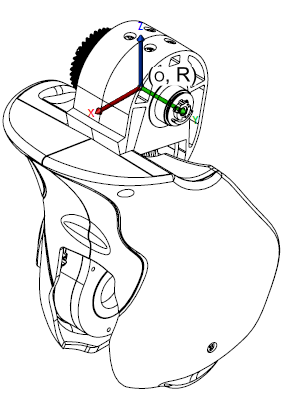
颈部
| 质量(g) | 59.30 |
|---|---|
| 重心(mm) | X = -0.02 Y = 0.17 Z = -25.56 |
| 惯性矩阵(g*mm²) |
Ixx = 61803.08 Ixy = 2.05 Ixz = 49.48 Iyx = 2.05 Iyy = 62818.59 Iyz = 50.67 Izx = 49.48 Izy = 50.67 Izz = 5439.77 |
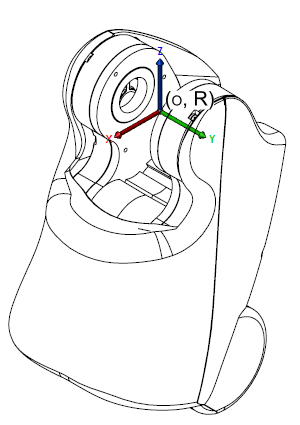
头部
| 质量(g) | 520.65 |
|---|---|
| 重心(mm) | X = 1.20 Y = -0.84 Z = 53.53 |
| 惯性矩阵(g*mm²) |
Ixx = 2265870.04 Ixy = -7871.81 Ixz = 11926.53 Iyx = -7871.81 Iyy = 2264205.13 Iyz = 2318.46 Izx = 11926.53 Izy = 2318.46 Izz = 873733.21 |
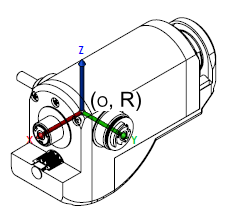
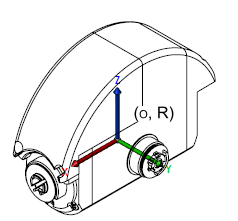
右肩
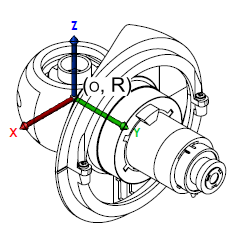
| 质量(g) | 69.84 |
|---|---|
| 重心(mm) | X = -1.78 Y = 24.96 Z = 0.18 |
| 惯性矩阵(g*mm²) |
Ixx = 71024.99 Ixy = -2024.67 Ixz = -17.22 Iyx = -2024.67 Iyy = 14057.99 Iyz = 8.41 Izx = -17.22 Izy = 8.41 Izz = 73166.00 |
右上臂
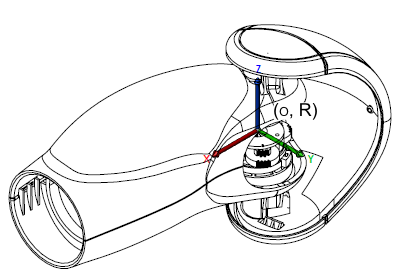
| 质量(g) | 123.09 |
|---|---|
| 重心(mm) | X = 18.85 Y = -5.77 Z = 0.65 |
| 惯性矩阵(g*mm²) |
Ixx = 82284.13 Ixy = -39780.57 Ixz = 7526.01 Iyx = -39780.57 Iyy = 290014.45 Iyz = -1529.45 Izx = 7526.01 Izy = -1529.45 Izz = 268423.31 |
右肘
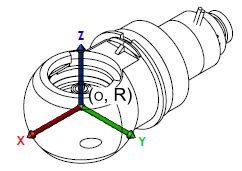
| 质量(g) | 59.71 |
|---|---|
| 重心(mm) | X = -25.60 Y = 0.01 Z = -0.19 |
| 惯性矩阵(g*mm²) |
Ixx = 5503.19 Ixy = -22.43 Ixz = -15.34 Iyx = -22.43 Iyy = 62254.05 Iyz = 5.59 Izx = -15.34 Izy = 5.59 Izz = 63251.24 |
装有电机的右前臂
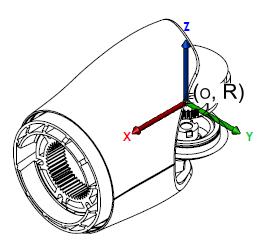
| 质量(g) | 77.24 |
|---|---|
| 重心(mm) | X = 25.56 Y = -2.73 Z = 0.96 |
| 惯性矩阵(g*mm²) |
Ixx = 25194.83 Ixy = -2162.93 Ixz = 718.46 Iyx = -2162.93 Iyy = 88903.15 Iyz = -108.09 Izx = 718.46 Izy = -108.09 Izz = 86868.67 |
装有电机的右手
| 质量(g) | 166.53 |
|---|---|
| 重心(mm) | X = 31.80 Y = -0.83 Z = 4.77 |
| 惯性矩阵(g*mm²) |
Ixx = 61056.75 Ixy = -5036.40 Ixz = 38953.69 Iyx = -5036.40 Iyy = 279473.51 Iyz = -2930.76 Izx = 38953.69 Izy = -2930.76 Izz = 279988.03 |
没有电机的右前臂
| 质量(g) | 185.00 |
|---|---|
| 重心(mm) | X = 65.36 Y = -0.34 Z = -0.02 |
| 惯性矩阵(g*mm²) |
Ixx = 78310.52 Ixy = 10067.58 Ixz = -7569.42 Iyx = 10067.58 Iyy = 1129968.01 Iyz = -132.37 Izx = -7569.42 Izy = -132.37 Izz = 1126955.18 |
右骨盆
| 质量(g) | 71.17 |
|---|---|
| 重心(mm) | X = -7.66 Y = 12.00 Z = 27.17 |
| 惯性矩阵(g*mm²) |
Ixx = 89971.64 Ixy = -5002.14 Ixz = -12735.48 Iyx = -5002.14 Iyy = 105522.50 Iyz = 27700.75 Izx = -12735.48 Izy = 27700.75 Izz = 66883.82 |
右髋
| 质量(g) | 135.30 |
|---|---|
| 重心(mm) | X = -16.49 Y = -0.29 Z = -4.75 |
| 惯性矩阵(g*mm²) |
Ixx = 27911.29 Ixy = 47.65 Ixz = 5309.58 Iyx = 47.65 Iyy = 101468.47 Iyz = 0.07 Izx = 5309.58 Izy = 0.07 Izz = 92091.65 |
右大腿
| 质量(g) | 394.21 |
|---|---|
| 重心(mm) | X = 1.32 Y = -2.35 Z = -53.52 |
| 惯性矩阵(g*mm²) |
Ixx = 1630119.59 Ixy = 319.39 Ixz = -82870.48 Iyx = 319.39 Iyy = 1592699.48 Iyz = 43339.19 Izx = -82870.48 Izy = 43339.19 Izz = 301208.88 |
右小腿
| 质量(g) | 291.59 |
|---|---|
| 重心(mm) | X = 4.22 Y = -2.520 Z = -48.68 |
| 惯性矩阵(g*mm²) |
Ixx = 1153825.50 Ixy = 775.29 Ixz = -32312.79 Iyx = 775.29 Iyy = 1103777.29 Iyz = 43967.28 Izx = -32312.79 Izy = 43967.28 Izz = 188610.38 |
右踝
| 质量(g) | 138.92 |
|---|---|
| 重心(mm) | X = 1.42 Y = -0.28 Z = 6.38 |
| 惯性矩阵(g*mm²) |
Ixx = 38826.14 Ixy = -47.11 Ixz = -2213.27 Iyx = -47.11 Iyy = 72115.71 Iyz = 6.86 Izx = -2213.27 Izy = 6.86 Izz = 53520.41 |
右足
| 质量(g) | 161.75 |
|---|---|
| 重心(mm) | X = 25.40 Y = -3.32 Z = -32.41 |
| 惯性矩阵(g*mm²) |
Ixx = 269612.04 Ixy = -5876.90 Ixz = -139244.46 Iyx = -5876.90 Iyy = 643878.18 Iyz = 18870.96 Izx = -139244.46 Izy = 18870.96 Izz = 525191.67 |