有关关节的信息
头部关节
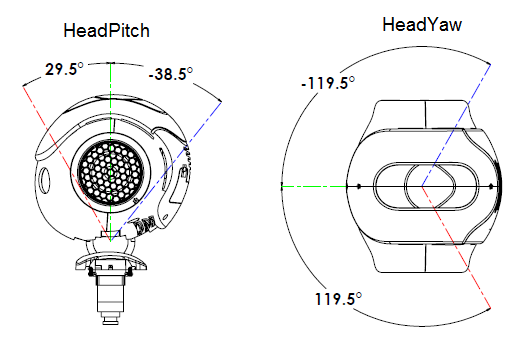
| 关节名称 | 动作 | 范围(度) | 范围 (弧度) |
|---|---|---|---|
| HeadYaw | 头部关节扭转(Z) | -119.5 至 119.5 | -2.0857 至 2.0857 |
| HeadPitch | 头部关节前、后动(Y) | -38.5 至 29.5 | -0.6720 至 0.5149 |
访问值时,使用ALMemory关键码名。
命令(弧度):
Device/SubDeviceList/HeadPitch/Position/Actuator/Value Device/SubDeviceList/HeadYaw/Position/Actuator/Value
传感器(弧度):
Device/SubDeviceList/HeadPitch/Position/Sensor/Value Device/SubDeviceList/HeadYaw/Position/Sensor/Value
右臂关节
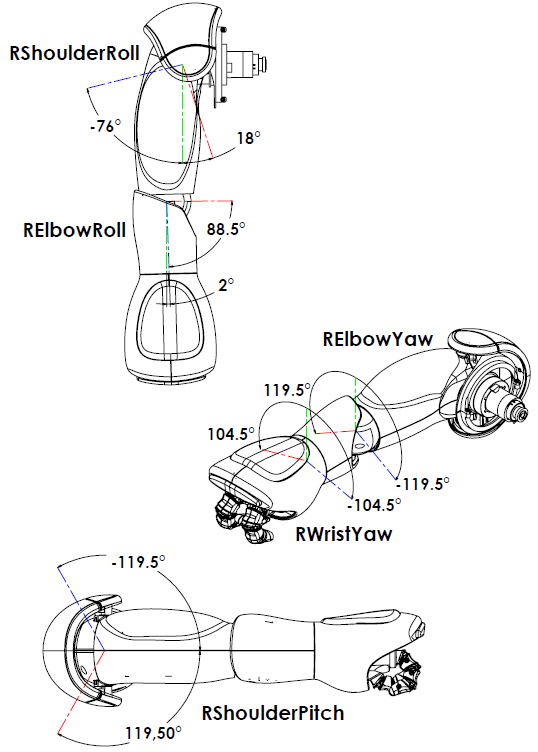
| 关节名称 | 动作 | 范围(度) | 范围(弧度) |
|---|---|---|---|
| RShoulderPitch | 右肩关节前、后动(Y) | -119.5 至 119.5 | -2.0857 至 2.0857 |
| RShoulderRoll | 右肩关节左、右动(Z) | -76.5 至 18 | -1.3265 至 0.3142 |
| RElbowYaw | 右肩关节扭转(X) | -119.5 至 119.5 | -2.0857 至 2.0857 |
| RElbowRoll | 右肘关节(Z) | 2 至 88.5 | 0.0349 至 1.5446 |
| RWristYaw | 右腕关节(X) | -104.5 至 104.5 | -1.8238 至 1.8238 |
| RHand | 右手 | 打开、合拢 |
访问值时,使用ALMemory关键码名。
命令(弧度):
Device/SubDeviceList/RShoulderPitch/Position/Actuator/Value Device/SubDeviceList/RShoulderRoll/Position/Actuator/Value Device/SubDeviceList/RElbowYaw/Position/Actuator/Value Device/SubDeviceList/RWristYaw/Position/Actuator/Value Device/SubDeviceList/RHand/Position/Actuator/Value
传感器(弧度):
Device/SubDeviceList/RShoulderPitch/Position/Sensor/Value Device/SubDeviceList/RShoulderRoll/Position/Sensor/Value Device/SubDeviceList/RElbowYaw/Position/Sensor/Value Device/SubDeviceList/RWristYaw/Position/Sensor/Value Device/SubDeviceList/RHand/Position/Sensor/Value
左臂关节
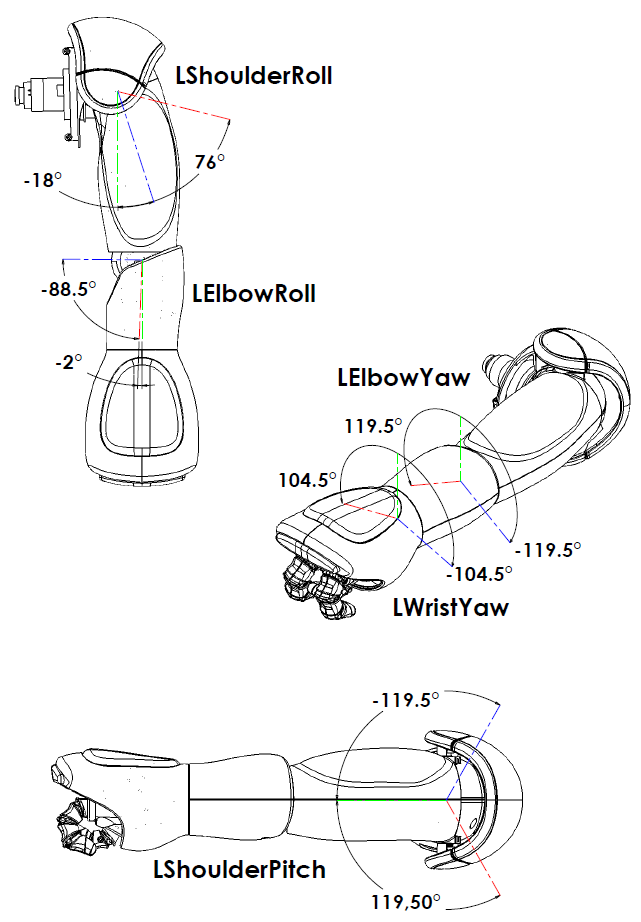
| 关节名称 | 动作 | 范围(度) | 范围 (弧度) |
|---|---|---|---|
| LShoulderPitch | 左肩关节前、后动(Y) | -119.5 至 119.5 | -2.0857 至 2.0857 |
| LShoulderRoll | 左肩关节左、右动(Z) | -18 至 76 | -0.3142 至 1.3265 |
| LElbowYaw | 左肩关节扭转(X) | -119.5 至 119.5 | -2.0857 至 2.0857 |
| LElbowRoll | 左肘关节(Z) | -88.5 至 -2 | -1.5446 至 -0.0349 |
| LWristYaw | 左腕关节(X) | -104.5 至 104.5 | -1.8238 至 1.8238 |
| LHand | 左手 | 打开、合拢 |
访问值时,使用ALMemory关键码名。
命令(弧度):
Device/SubDeviceList/LShoulderPitch/Position/Actuator/Value Device/SubDeviceList/LShoulderRoll/Position/Actuator/Value Device/SubDeviceList/LElbowYaw/Position/Actuator/Value Device/SubDeviceList/LWristYaw/Position/Actuator/Value Device/SubDeviceList/LHand/Position/Actuator/Value
传感器(弧度):
Device/SubDeviceList/LShoulderPitch/Position/Sensor/Value Device/SubDeviceList/LShoulderRoll/Position/Sensor/Value Device/SubDeviceList/LElbowYaw/Position/Sensor/Value Device/SubDeviceList/LWristYaw/Position/Sensor/Value Device/SubDeviceList/LHand/Position/Sensor/Value
骨盆关节
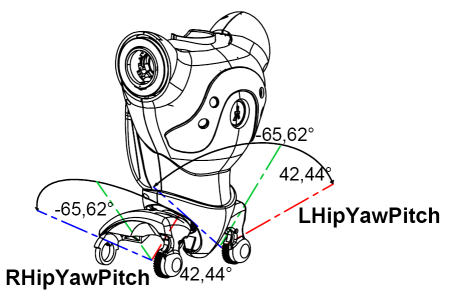
| 关节名称 | 动作 | 范围(度) | 范围 (弧度) |
|---|---|---|---|
| LHipYawPitch* | 左髋关节扭转(Y-Z 45°) | -65.62 至 42.44 | -1.145303 至 0.740810 |
| RHipYawPitch* | 右髋关节扭转(Y-Z 45°) | -65.62 至 42.44 | -1.145303 至 0.740810 |
| 注释: |
*LHipYawPitch和RHipYawPitch实际上是一个电机,因此不能分开控制。 |
|---|
访问值时,使用ALMemory关键码名。
命令(弧度):
Device/SubDeviceList/LHipYawPitch/Position/Actuator/Value Device/SubDeviceList/RHipYawPitch/Position/Actuator/Value
传感器(弧度):
Device/SubDeviceList/LHipYawPitch/Position/Sensor/Value Device/SubDeviceList/RHipYawPitch/Position/Sensor/Value
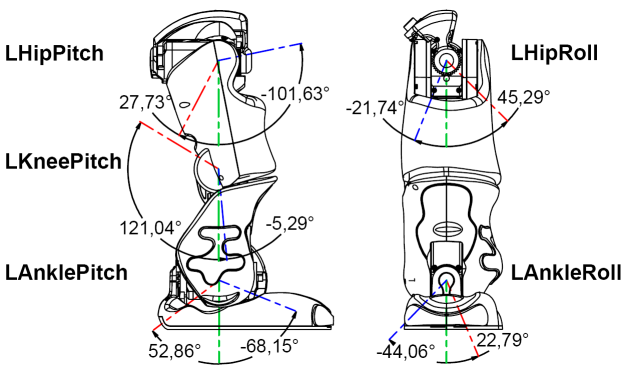
左腿关节
| 关节名称 | 动作 | 范围(度) | 范围 (弧度) |
|---|---|---|---|
| LHipRoll | 左髋关节左、右动(X) | -21.74 至 45.29 | -0.379472 至 0.790477 |
| LHipPitch | 左髋关节前、后动(Y) | -101.63 至 27.73 | -1.773912 至 0.484090 |
| LKneePitch | 左膝关节(Y) | -5.29 至 121.04 | -0.092346 至 2.112528 |
| LAnklePitch | 左踝关节前、后动(Y) | -68.15 至 52.86 | -1.189516 至 0.922747 |
| LAnkleRoll | 左踝关节左、右动(X) | -44.06 至 22.79 | -0.769001 至 0.397880 |
访问值时,使用ALMemory关键码名。
命令(弧度):
Device/SubDeviceList/LHipRoll/Position/Actuator/Value Device/SubDeviceList/LHipPitch/Position/Actuator/Value Device/SubDeviceList/LKneePitch/Position/Actuator/Value Device/SubDeviceList/LAnklePitch/Position/Actuator/Value Device/SubDeviceList/LAnkleRoll/Position/Actuator/Value
传感器(弧度):
Device/SubDeviceList/LHipRoll/Position/Sensor/Value Device/SubDeviceList/LHipPitch/Position/Sensor/Value Device/SubDeviceList/LKneePitch/Position/Sensor/Value Device/SubDeviceList/LAnklePitch/Position/Sensor/Value Device/SubDeviceList/LAnkleRoll/Position/Sensor/Value
由于会与NAO外壳发生碰撞,因此踝关节的左右和前后摆动受到一定限制。
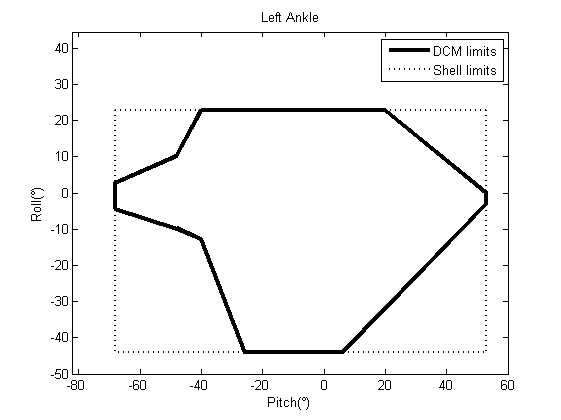
| LAnklePitch(°) | LAnkleRoll+(°) | LAnkleRoll-(°) |
|---|---|---|
| -68.15 | 2.86 | -4.29 |
| -48.12 | 10.31 | -9.74 |
| -40.10 | 22.79 | -12.60 |
| -25.78 | 22.79 | -44.06 |
| 5.72 | 22.79 | -44.06 |
| 20.05 | 22.79 | -31.54 |
| 52.86 | 0.00 | -2.86 |
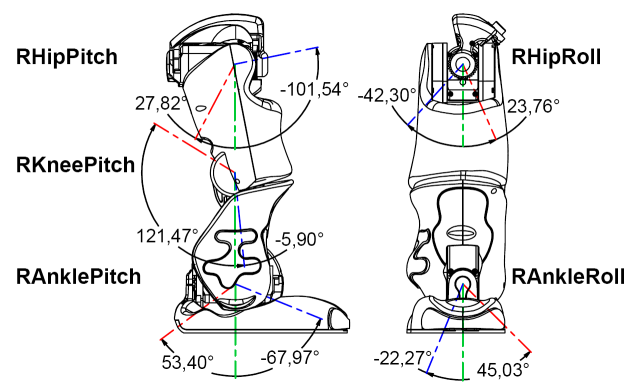
右腿关节
| 关节名称 | 动作 | 范围(度) | 范围 (弧度) |
|---|---|---|---|
| RHipRoll | 右髋关节左、右动(X) | -42.30 至 23.76 | -0.738321 至 0.414754 |
| RHipPitch | 右髋关节前、后动(Y) | -101.54 至 27.82 | -1.772308 至 0.485624 |
| RKneePitch | 右膝关节(Y) | -5.90 至 121.47 | -0.103083 至 2.120198 |
| RAnklePitch | 右踝关节前、后动(Y) | -67.97 至 53.40 | -1.186448 至 0.932056 |
| RAnkleRoll | 右踝关节左、右动(X) | -22.27 至 45.03 | -0.388676 至 0.785875 |
访问值时,使用ALMemory关键码名。
命令(弧度):
Device/SubDeviceList/RHipRoll/Position/Actuator/Value Device/SubDeviceList/RHipPitch/Position/Actuator/Value Device/SubDeviceList/RKneePitch/Position/Actuator/Value Device/SubDeviceList/RAnklePitch/Position/Actuator/Value Device/SubDeviceList/RAnkleRoll/Position/Actuator/Value
传感器(弧度):
Device/SubDeviceList/RHipRoll/Position/Sensor/Value Device/SubDeviceList/RHipPitch/Position/Sensor/Value Device/SubDeviceList/RKneePitch/Position/Sensor/Value Device/SubDeviceList/RAnklePitch/Position/Sensor/Value Device/SubDeviceList/RAnkleRoll/Position/Sensor/Value
由于会与NAO外壳发生碰撞,因此踝关节的左右和前后摆动受到一定限制。
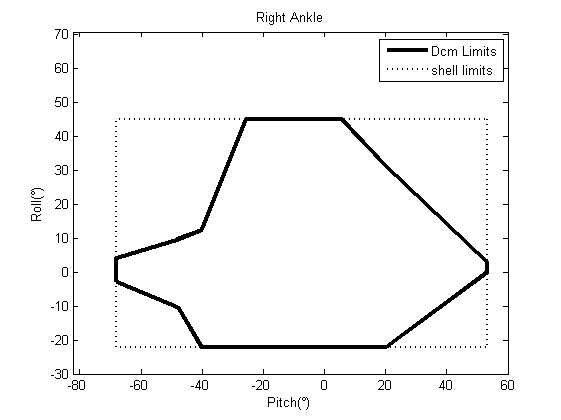
| RAnklePitch(°) | RAnkleRoll+(°) | RAnkleRoll-(°) |
|---|---|---|
| -67.97 | 4.29 | -2.86 |
| -48.13 | 9.74 | -10.31 |
| -40.10 | 12.60 | -22.27 |
| -25.78 | 45.03 | -22.27 |
| 5.73 | 45.03 | -22.27 |
| 20.05 | 31.54 | -22.27 |
| 53.4 | 2.87 | 0.00 |