惯性单元(inertial unit)
惯性单元位于机器人胸部,带有自己的处理器。输出数据为胸部的速度和高度(Yaw、Pitch、Roll)的估计值。中心单元由以下部分组成:
- 双轴陀螺仪(精确度5%,角速度约为500°/s)
-
一个三轴加速计(精确度1%,加速约为2G)
http://www.st.com/stonline/products/literature/ds/12726/lis302dl.pdf
躯干角度计算法
Aldebaran计算法根据加速计和陀螺仪的数据计算躯干角度,在惯性电路板内部编程。
该计算法恰当地使用每个传感器的特点。静态时,加速计是唯一的绝对参照,提供正确的躯干角度。当探测到动作时,输出角度便由适合在动态模式下使用的陀螺仪来计算。然而,使用陀螺仪会引起计算角度偏差。因此,在动态模式下,计算法会结合加速计和陀螺仪的计算角度来缩小角度偏差。
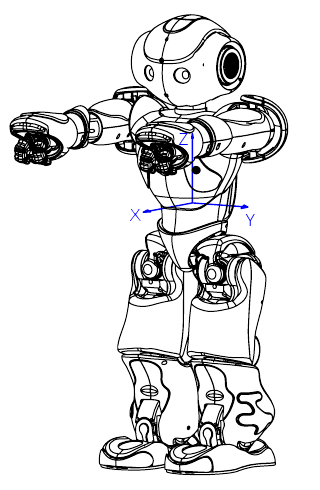
相对于躯干框架的位置
| 器件 | X(m) | Y(m) | Z(m) |
|---|---|---|---|
| 加速计 | -0.008 | 0.00606 | 0.027 |
| 陀螺仪 | -0.008 | 0.006 | 0.029 |
访问值时,使用ALMemory 关键码名
原始数据加速计(m/s²):
Device/SubDeviceList/InertialSensor/AccX/Sensor/Value Device/SubDeviceList/InertialSensor/AccY/Sensor/Value Device/SubDeviceList/InertialSensor/AccZ/Sensor/Value
原始数据陀螺仪(弧度/s):
Device/SubDeviceList/InertialSensor/GyrX/Sensor/Value Device/SubDeviceList/InertialSensor/GyrY/Sensor/Value
过滤数据(弧度):
Device/SubDeviceList/InertialSensor/AngleX/Sensor/Value Device/SubDeviceList/InertialSensor/AngleY/Sensor/Value