超声波
NAO配备有4个超声波传感器,用来判断与周围环境中障碍物之间的距离。探测范围为0到70cm,但是小于15cm时,没有具体的距离信息,机器人只是知道有一个物体存在。
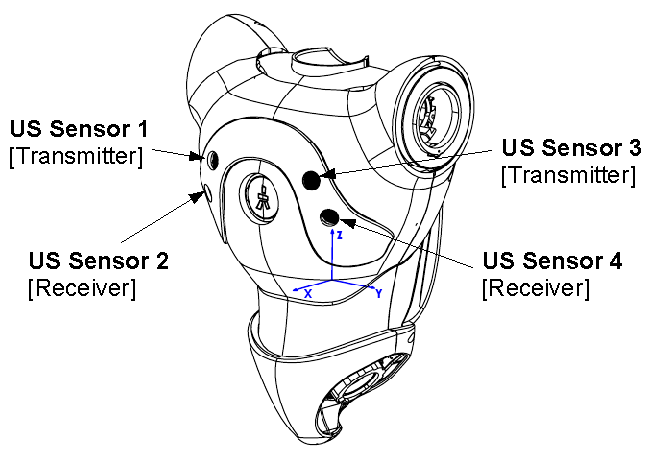
相对于躯干框架的位置
| 超声波传感器(US sensor)名称 | X(m) | Y(m) | Z(m) | WX(rd) [deg]* | WY(rd) [deg]* | WZ(rd) [deg]* |
|---|---|---|---|---|---|---|
| US sensor 1 | 0.0537 | -0.0341 | -0.0698 | 0.0 | -0.1745 [-10.0] | 0.3490 [-20.0] |
| US sensor 2 | 0.0477 | -0.0416 | -0.0509 | 0.0 | 0.2618 [15.0] | -0.4363 [-25.0] |
| 注释: |
* 我们使用“roll”(左右动)、“pitch”(前后动)和“yaw”(扭转)来表示角度。由此,使用T=rotZ(Wz)*rotY(Wy)*rotX(Wx)来构建与转动(rotation)的协调转换。 |
|---|
- :相对于机器人的矢状面与“US sensor 1”对称。
- :相对于机器人的矢状面与“US sensor 2”对称。
访问值时,使用ALMemory关键码名
左侧超声波(m):
Device/SubDeviceList/US/Left/Sensor/Value Device/SubDeviceList/US/Left/Sensor/Value1 Device/SubDeviceList/US/Left/Sensor/Value2 Device/SubDeviceList/US/Left/Sensor/Value3 Device/SubDeviceList/US/Left/Sensor/Value4 Device/SubDeviceList/US/Left/Sensor/Value5 Device/SubDeviceList/US/Left/Sensor/Value6 Device/SubDeviceList/US/Left/Sensor/Value7 Device/SubDeviceList/US/Left/Sensor/Value8 Device/SubDeviceList/US/Left/Sensor/Value9
右侧超声波(m):
Device/SubDeviceList/US/Right/Sensor/Value Device/SubDeviceList/US/Right/Sensor/Value1 Device/SubDeviceList/US/Right/Sensor/Value2 Device/SubDeviceList/US/Right/Sensor/Value3 Device/SubDeviceList/US/Right/Sensor/Value4 Device/SubDeviceList/US/Right/Sensor/Value5 Device/SubDeviceList/US/Right/Sensor/Value6 Device/SubDeviceList/US/Right/Sensor/Value7 Device/SubDeviceList/US/Right/Sensor/Value8 Device/SubDeviceList/US/Right/Sensor/Value9