Video camera
Two identical video cameras are located in the forehead. They provide a 640x480 resolution at 30 frames per second. They can be used to identify objects in the visual field such as goals and balls, and bottom camera can ease NAO's dribbles.
| Camera output | YUV422 |
|---|---|
| Field of view | 58 degrees (diagonal) |
| Focus range | 30cm ~ infinity |
| Focus type | Fixed focus |
The picture underneath is a RGB conversion of the raw file sent by the camera.

Camera Position relative to End Transform of Head Chain (see ALMotion\Advanced\Model)
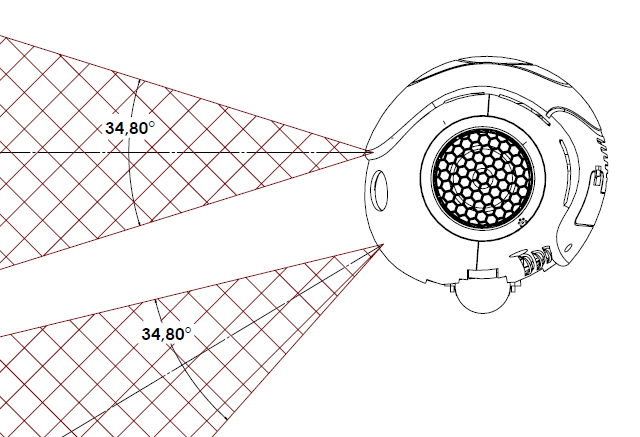
Head 3.3:
| Warning: | The conception of the head 3.3 does not warrant the angle between the 2 cameras. |
|---|
Head 3.2:
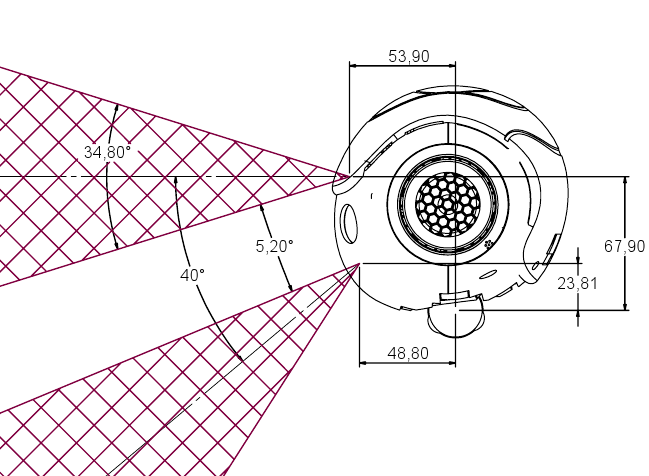
| Camera name | X(m) | Y(m) | Z(m) | WX(rd)[deg]* | WY(rd)[deg]* | WZ(rd)[deg]* |
|---|---|---|---|---|---|---|
| CameraTop | 0.0539 | 0.0 | 0.0679 | 0.0 | 0.0 | 0.0 |
| CameraBottom | 0.0488 | 0.0 | 0.02381 | 0.0 | 0.6981 [40.0] | 0.0 |
| Note: |
* We adopt the roll, pitch and yaw notation for angle representation. So, to construct an homogenous transform with rotation (Wx,Wy,Wz) use T=rotZ(Wz)*rotY(Wy)*rotX(Wx) |
|---|