Description of the motors
There are two types of motors in NAO and for each motor, there are two types of speed reduction ratio.
| Motors | Motor type 1 | Motor type 2 |
|---|---|---|
| No load speed | 8000 rpm | 11 900 rpm |
| Stall torque | 59.5 mNm | 15.1 mNm |
| Nominal speed | 6330 rpm | 8810 rpm |
| Nominal torque | 12.3 mNm | 3.84 mNm |
| Motors | Motor type 1 | Motor type 2 |
|---|---|---|
| Reduction ratio type 1 | 201.3 | 150.27 |
| No load speed | 238.45 °/s (4.76°/20ms) | 473.72 °/s (9.47°/ 20ms) |
| Stall torque | 11.97 Nm (without the ratio efficiency) | 2.27 Nm (without the ratio efficiency) |
| Nominal speed | 188.67 °/s (3.77°/20ms) | 351.77 °/s (7.03°/20ms) |
| Nominal torque | 2.47 Nm (without the ratio efficiency) | 0.57 Nm (without the ratio efficiency) |
| Motors | Motor type 1 | Motor type 2 |
|---|---|---|
| Reduction ratio type 2 | 130.85 | 173.22 |
| No load speed | 366.83 °/s (7.33°/20ms) | 412.19 °/s (8.24°/ 20ms) |
| Stall torque | 7.78 Nm (without the ratio efficiency) | 2.61 Nm (without the ratio efficiency) |
| Nominal speed | 290.25 °/s (5.80°/20ms) | 305.16 °/s (6.10°/20ms) |
| Nominal torque | 1.61 Nm (without the ratio efficiency) | 0.66 Nm (without the ratio efficiency) |
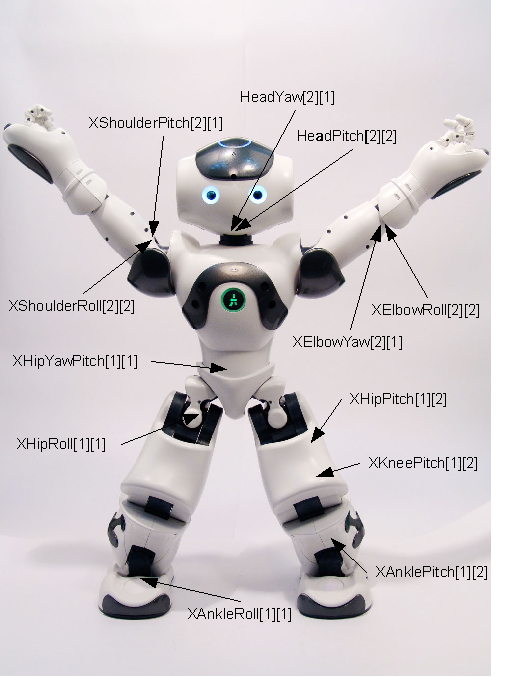
Motor and reduction type for each joint
This diagram reprensents the motor type and reduction ratio for each joint in NAO: Joint Name[Motor Type][Reductor Type]
Copyright © 2010 Aldebaran-Robotics - All rights reserved