The inertial unit
The inertial unit is located in the chest with its own processor. The output data enables an estimation of the chest speed and attitude (Yaw, Pitch, Roll). The central unit is made of:
- two axis gyrometers (5% precision with an angular speed of ~500°/s)
-
on three axis accelerometer (1% precision with an acceleration of ~2G)
http://www.st.com/stonline/products/literature/ds/12726/lis302dl.pdf
Compute Torso Angle Algorithm
An Aldebaran Algorithm to compute the torso Angle from accelerometers and gyrometers is programming inside the inertial board.
This algorithm used the good proprieties of each sensor: accelerometer is the only absolute reference and give the good torso angle in static mode. When some motion is detected, the output angle is computed with gyrometers which have a good behavior in dynamic. However, integration of gyrometers creates a bias of the compute angle, so in dynamic mode, a fusion of compute angle from accelerometer and gyrometer is done to reduce this bias.
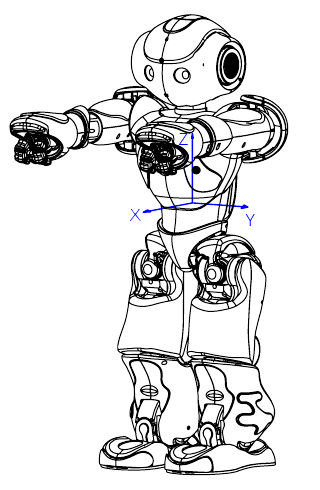
Position relative to the Torso frame
| Device | X(m) | Y(m) | Z(m) |
|---|---|---|---|
| Accelerometer | -0.008 | 0.00606 | 0.027 |
| Gyrometer | -0.008 | 0.006 | 0.029 |
Access value by using ALMemory key name
Raw data accelerometer(m/s²):
Device/SubDeviceList/InertialSensor/AccX/Sensor/Value Device/SubDeviceList/InertialSensor/AccY/Sensor/Value Device/SubDeviceList/InertialSensor/AccZ/Sensor/Value
Raw data gyrometer(radian/s):
Device/SubDeviceList/InertialSensor/GyrX/Sensor/Value Device/SubDeviceList/InertialSensor/GyrY/Sensor/Value
Filtered data(radian):
Device/SubDeviceList/InertialSensor/AngleX/Sensor/Value Device/SubDeviceList/InertialSensor/AngleY/Sensor/Value