Sonars
NAO is equipped with four sonars which allow it to estimate the distance to obstacles in its environment. The detection range goes from 0 cm to 70 cm, but under 15 cm there is no distance information, the robot only knows that an object is present.
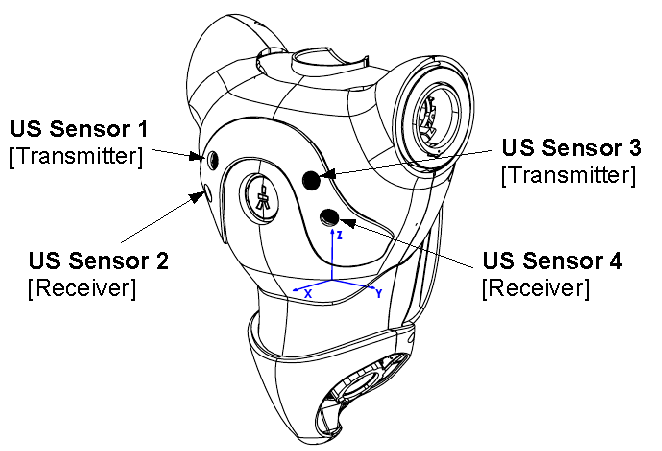
Position relative to the Torso frame
| Sonar name | X(m) | Y(m) | Z(m) | WX(rd)[deg]* | WY(rd)[deg]* | WZ(rd)[deg]* |
|---|---|---|---|---|---|---|
| US sensor 1 | 0.0537 | -0.0341 | -0.0698 | 0.0 | -0.1745 [-10.0] | 0.3490 [-20.0] |
| US sensor 2 | 0.0477 | -0.0416 | -0.0509 | 0.0 | 0.2618 [15.0] | -0.4363 [-25.0] |
| Note: |
* We adopt the roll, pitch and yaw notation for angle representation. So, to construct an homogenous transform with rotation (Wx,Wy,Wz) use T=rotZ(Wz)*rotY(Wy)*rotX(Wx) |
|---|
- is symmetrical to US sensor 1 with respect to sagittal plane of the robot.
- is symmetrical to US sensor 2 with respect to sagittal plane of the robot.
Access echos value by using ALMemory key name
Left sonar(m):
Device/SubDeviceList/US/Left/Sensor/Value Device/SubDeviceList/US/Left/Sensor/Value1 Device/SubDeviceList/US/Left/Sensor/Value2 Device/SubDeviceList/US/Left/Sensor/Value3 Device/SubDeviceList/US/Left/Sensor/Value4 Device/SubDeviceList/US/Left/Sensor/Value5 Device/SubDeviceList/US/Left/Sensor/Value6 Device/SubDeviceList/US/Left/Sensor/Value7 Device/SubDeviceList/US/Left/Sensor/Value8 Device/SubDeviceList/US/Left/Sensor/Value9
Right sonar(m):
Device/SubDeviceList/US/Right/Sensor/Value Device/SubDeviceList/US/Right/Sensor/Value1 Device/SubDeviceList/US/Right/Sensor/Value2 Device/SubDeviceList/US/Right/Sensor/Value3 Device/SubDeviceList/US/Right/Sensor/Value4 Device/SubDeviceList/US/Right/Sensor/Value5 Device/SubDeviceList/US/Right/Sensor/Value6 Device/SubDeviceList/US/Right/Sensor/Value7 Device/SubDeviceList/US/Right/Sensor/Value8 Device/SubDeviceList/US/Right/Sensor/Value9