Masses information
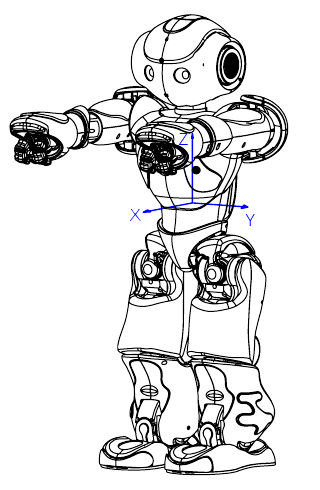
This page details the mass, center of mass and inertial matrix of each solid (S) on the right side of a NAO 3.3.
The center of mass position and the inertial matrix are described relative to the local coordinate system of the current solid (S) (o, R).
All solids (S) and local coordinate system are descrribed relative to the zero posture: standing with straight legs and arms pointing forwards).

NAO
| NAO H25 (grams) | 4996 |
|---|---|
| NAO H21 (grams) | 4879 |
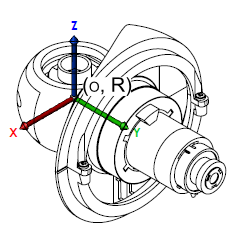
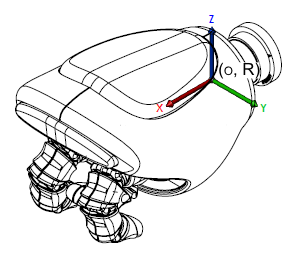
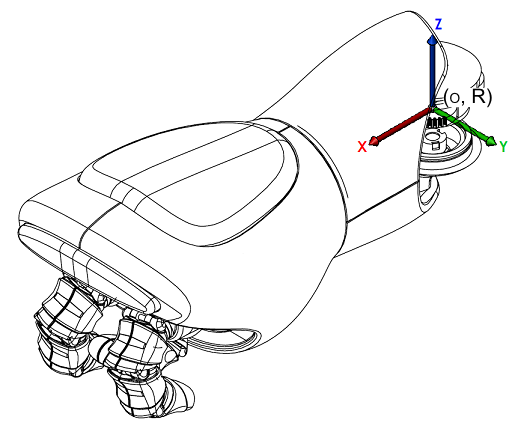
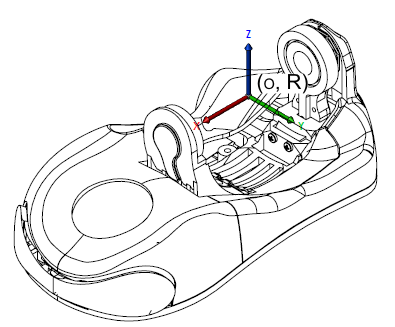
Torso
| Mass (grams) | 1039.48 |
|---|---|
| Center of Mass CoM(S)(o, R) (mm) | XG = -4.15 YG = 0.07 ZG = 42.58 |
| Inertial matrix [IO(S)]R (grams*mm2) |
Ixx = 4967419.76 Ixy = -12473.98 Ixz = -164468.14 Iyx = -12473.98 Iyy = 4791352.46 Iyz = 24776.69 Izx = -164468.14 Izy = 24776.69 Izz = 1597848.29 |
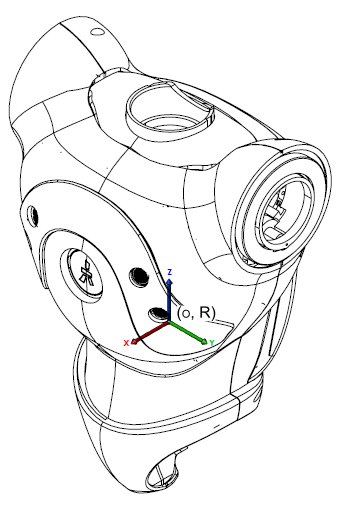
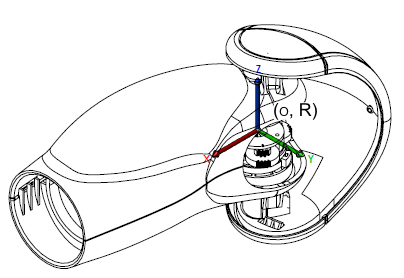
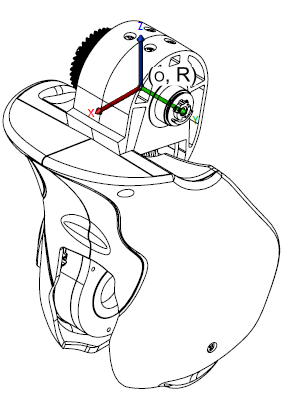
Neck
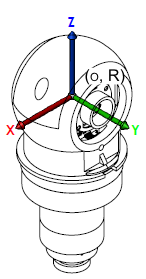
| Mass (grams) | 59.30 |
|---|---|
| Center of Mass CoM(S)(o, R) (mm) | XG = -0.02 YG = 0.17 ZG = -25.56 |
| Inertial matrix [IO(S)]R (grams*mm2) |
Ixx = 61803.08 Ixy = 2.05 Ixz = 49.48 Iyx = 2.05 Iyy = 62818.59 Iyz = 50.67 Izx = 49.48 Izy = 50.67 Izz = 5439.77 |
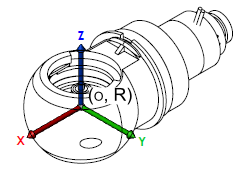
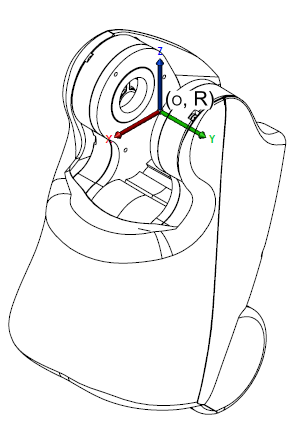
Head
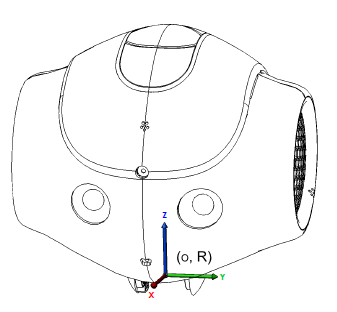
| Mass (grams) | 520.65 |
|---|---|
| Center of Mass CoM(S)(o, R) (mm) | XG = 1.20 YG = -0.84 ZG = 53.53 |
| Inertial matrix [IO(S)]R (grams*mm2) |
Ixx = 2265870.04 Ixy = -7871.81 Ixz = 11926.53 Iyx = -7871.81 Iyy = 2264205.13 Iyz = 2318.46 Izx = 11926.53 Izy = 2318.46 Izz = 873733.21 |
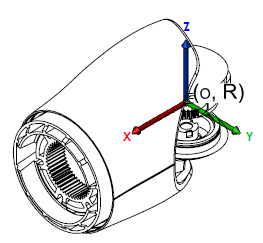
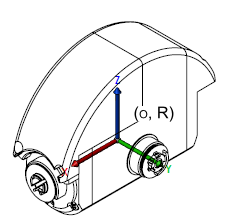
Right Shoulder
| Mass (grams) | 69.96 |
|---|---|
| Center of Mass CoM(S)(o, R) (mm) | XG = -1.78 YG = 24.96 ZG = 0.18 |
| Inertial matrix [IO(S)]R (grams*mm2) |
Ixx = 71024.99 Ixy = -2024.67 Ixz = -17.22 Iyx = -2024.67 Iyy = 14057.99 Iyz = 8.41 Izx = -17.22 Izy = 8.41 Izz = 73166.00 |
Right Bicep
| Mass (grams) | 123.09 |
|---|---|
| Center of Mass CoM(S)(o, R) (mm) | XG = 18.85 YG = -5.77 ZG = 0.65 |
| Inertial matrix [IO(S)]R (grams*mm2) |
Ixx = 82284.13 Ixy = -39780.57 Ixz = 7526.01 Iyx = -39780.57 Iyy = 290014.45 Iyz = -1529.45 Izx = 7526.01 Izy = -1529.45 Izz = 268423.31 |
Right Elbow
| Mass (grams) | 59.71 |
|---|---|
| Center of Mass CoM(S)(o, R) (mm) | XG = -25.60 YG = 0.01 ZG = -0.19 |
| Inertial matrix [IO(S)]R (grams*mm2) |
Ixx = 5503.19 Ixy = -22.43 Ixz = -15.34 Iyx = -22.43 Iyy = 62254.05 Iyz = 5.59 Izx = -15.34 Izy = 5.59 Izz = 63251.24 |
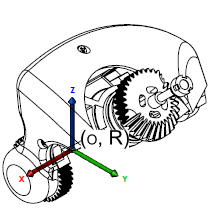
Right Motorized ForeArm
| Mass (grams) | 77.24 |
|---|---|
| Center of Mass CoM(S)(o, R) (mm) | XG = 25.56 YG = -2.73 ZG = 0.96 |
| Inertial matrix [IO(S)]R (grams*mm2) |
Ixx = 25194.83 Ixy = -2162.93 Ixz = 718.46 Iyx = -2162.93 Iyy = 88903.15 Iyz = -108.09 Izx = 718.46 Izy = -108.09 Izz = 86868.67 |
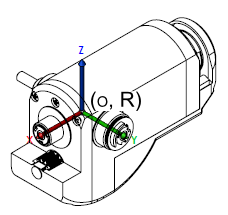
Right Motorized Hand
| Mass (grams) | 166.53 |
|---|---|
| Center of Mass CoM(S)(o, R) (mm) | XG = 31.80 YG = -0.83 ZG = 4.77 |
| Inertial matrix [IO(S)]R (grams*mm2) |
Ixx = 61056.75 Ixy = -5036.40 Ixz = 38953.69 Iyx = -5036.40 Iyy = 279473.51 Iyz = -2930.76 Izx = 38953.69 Izy = -2930.76 Izz = 279988.03 |
Right No Motorized Hand
| Mass (grams) | 185.00 |
|---|---|
| Center of Mass CoM(S)(o, R) (mm) | XG = 65.36 YG = -0.34 ZG = -0.02 |
| Inertial matrix [IO(S)]R (grams*mm2) |
Ixx = 78310.52 Ixy = 10067.58 Ixz = -7569.42 Iyx = 10067.58 Iyy = 1129968.01 Iyz = -132.37 Izx = -7569.42 Izy = -132.37 Izz = 1126955.18 |
Right Pelvis
| Mass (grams) | 71.17 |
|---|---|
| Center of Mass CoM(S)(o, R) (mm) | XG = -7.66 YG = 12.00 ZG = 27.17 |
| Inertial matrix [IO(S)]R (grams*mm2) |
Ixx = 89971.64 Ixy = -5002.14 Ixz = -12735.48 Iyx = -5002.14 Iyy = 105522.50 Iyz = 27700.75 Izx = -12735.48 Izy = 27700.75 Izz = 66883.82 |
Right Hip
| Mass (grams) | 135.30 |
|---|---|
| Center of Mass CoM(S)(o, R) (mm) | XG = -16.49 YG = -0.29 ZG = -4.75 |
| Inertial matrix [IO(S)]R (grams*mm2) |
Ixx = 27911.29 Ixy = 47.65 Ixz = 5309.58 Iyx = 47.65 Iyy = 101468.47 Iyz = 0.07 Izx = 5309.58 Izy = 0.07 Izz = 92091.65 |
Right Thigh
| Mass (grams) | 394.21 |
|---|---|
| Center of Mass CoM(S)(o, R) (mm) | XG = 1.32 YG = -2.35 ZG = -53.52 |
| Inertial matrix [IO(S)]R (grams*mm2) |
Ixx = 1630119.59 Ixy = 319.39 Ixz = -82870.48 Iyx = 319.39 Iyy = 1592699.48 Iyz = 43339.19 Izx = -82870.48 Izy = 43339.19 Izz = 301208.88 |
Right Tibia
| Mass (grams) | 291.59 |
|---|---|
| Center of Mass CoM(S)(o, R) (mm) | XG = 4.22 YG = -2.520 ZG = -48.68 |
| Inertial matrix [IO(S)]R (grams*mm2) |
Ixx = 1153825.50 Ixy = 775.29 Ixz = -32312.79 Iyx = 775.29 Iyy = 1103777.29 Iyz = 43967.28 Izx = -32312.79 Izy = 43967.28 Izz = 188610.38 |
Right Ankle
| Mass (grams) | 138.92 |
|---|---|
| Center of Mass CoM(S)(o, R) (mm) | XG = 1.42 YG = -0.28 ZG = 6.38 |
| Inertial matrix [IO(S)]R (grams*mm2) |
Ixx = 38826.14 Ixy = -47.11 Ixz = -2213.27 Iyx = -47.11 Iyy = 72115.71 Iyz = 6.86 Izx = -2213.27 Izy = 6.86 Izz = 53520.41 |
Right Foot
| Mass (grams) | 161.75 |
|---|---|
| Center of Mass CoM(S)(o, R) (mm) | XG = 25.40 YG = -3.32 ZG = -32.41 |
| Inertial matrix [IO(S)]R (grams*mm2) |
Ixx = 269612.04 Ixy = -5876.90 Ixz = -139244.46 Iyx = -5876.90 Iyy = 643878.18 Iyz = 18870.96 Izx = -139244.46 Izy = 18870.96 Izz = 525191.67 |