目的地控制
walkTo这一方法是一个广泛使用的行走模式。它是一个阻塞式函数,直至行走过程结束。如果您通过pCalled来使用该函数,那么最后接收的命令会覆盖以前所有的命令。
计划路径
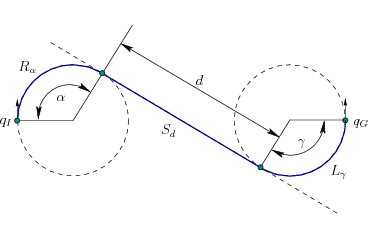
根据路径的距离,可以选择两个规划器中的一个来选择路径。如果整体路径小于0.4米,使用SE3插值来计算路径。否则,使用Dubins curve(见下图),由两个圆圈和一条直线组成。圆半径为0.15米。
参数
- x : 沿X轴(向前及向后)的距离,以米为单位。
- y : 沿Y轴(横向)的距离,以米为单位。
- theta : 相对于当前方向、机器人的最终方向,以弧度为单位。
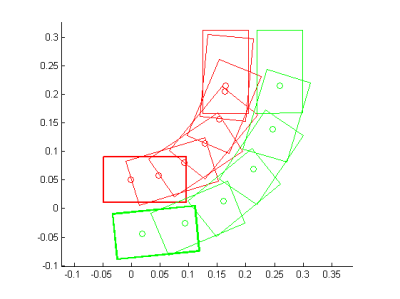
SE3路径范例
# Example showing the walkTo command. # As length of path is less than 0.4m # the path will use an SE3 interpolation # The units for this command are meters and radians x = 0.2 y = 0.2 # pi/2 anti-clockwise (90 degrees) theta = 1.5709 proxy.walkTo(x, y, theta)
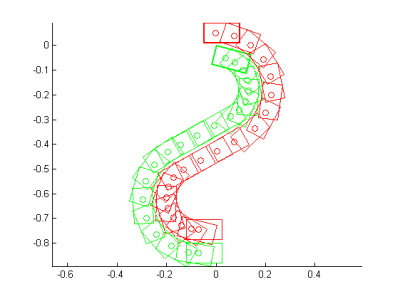
Dubins路径范例
# Example showing the walkTo command # As length of path is more than 0.4m # the path will follow a dubins curve # The units for this command are meters and radians x = -0.1 y = -0.7 theta = 0.0 proxy.walkTo(x, y, theta)