The 3D NAO panel
- The 3D NAO panel is a 3D representation of the robot used to create and simulate behaviors. This 3D model can either be a representation of a simulated NAO (if you are connected to a simulator) or the virtual mirror of the real NAO robot you are working with (if you are connected to the real robot IP address).
- You can switch between models and versions: go to > and select the 3D model corresponding to your robot (V3.3, V3.2 are the versions, H25, T14 and T2 are the models).
- Press the mouse buttons to zoom and move around the virtual model. You can also select any part of the robot (head, arms, body and legs) by simply clicking on it. This action will open a motion window like this one:
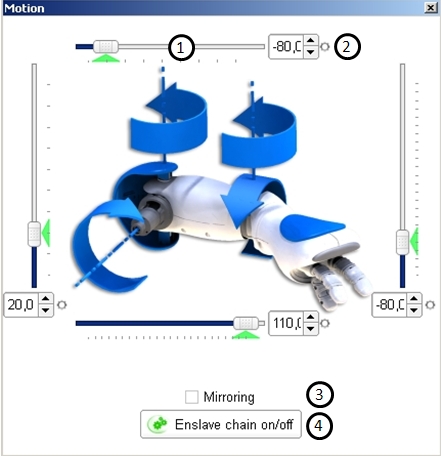
- This window allows you to modify the joints values of each limb. You can see the result of your actions on the virtual NAO model. We will describe more thoroughly the possibilities of the motion panel in the tutorial Create a movement from scratch.
Items Description (1) The slider allows you to adjust the joint values. You can easily move it, as well as enter a value in the associated text box. The little green arrow you can see at the bottom of the slider is the actual joint value of the robot. Using the slider or text box will send a value to the robot that will try to match your command as soon as possible. If the arrow is blue, it means that the robot has not yet matched the command you sent. When you send the command by releasing the mouse, it usually takes one second or so for the robot to be at the right position. If it takes longer, it may mean that the robot has a problem, like an obstacle for instance. (2) The Record button allows you to save the defined value. - If it is grey, either the joint is not saved in the selected keyframe or you are not in the motion editing mode.
- If it is red, the keyframe is storing the joint value (the actual robot joint value, that may differ from the command).
- If it is greyed out, it means that you are not currently editing a timeline frame.
(3) The option allows you to execute the actions (send command, register a joint value...) with exact symmetry on the symmetric limbs. (4) The button allows you to enslave or un-enslave all the motors of the robot. When a motor is un-enslaved, using the slider have no effect over NAO.
Copyright © 2010 Aldebaran-Robotics - All rights reserved