电路板
下文介绍电路板,以及电路板上不同的输入和输出的位置。
Pin分布
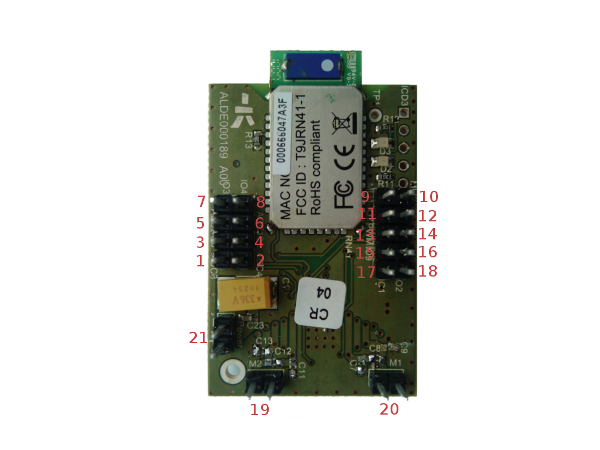
以下为外围设备在蓝牙电路板上的分布位置:
- 1,2,3,4: 模拟输入
- 5,6,7,8: 数字输出
- 9,10: 伺服机(servo)输出
- 11,12,14,16,17,18: 数字输入
- 13,15: PWM输出
- 19,20: 电机输出
- 21: 电源
电路板说明
-
电路板开启/关闭:
电路板可由一个4.5V到24V之间电源开启或关闭。
注释: 如果您想使用电机控制输出,就需要向电路板提供至少8V的电源(这是H桥组件的最小电压)。
-
ADC pins (模拟输入):四个模拟输入的电压介于0V到3.3V之间。
注意: 电压过高会损坏电路板。
-
数字输入:所有数字输入最高可承受5V电压。
注意: 电压过高会损坏电路板。
- 四个PWM需设定在-32767和32767之间。对于两个电机控制输出(PWM1和PWM2),信号会决定转动的方向。
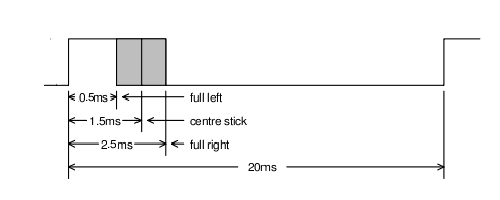
- 伺服机输出需设定在500和2500之间。这些值对应于以微秒为单位的脉冲宽度(请参见下文中的数字,以获得更详细的解释。)。
蓝牙器件
电路板上带有天线的宽组件就是蓝牙器件。在它的右侧有两个发光二极管(LED)。较高的那一个(D3)是连接LED。当这个LED在闪烁时,就说明蓝牙器件正在等待连接。 较低的LED(D2)是状态LED。当这个LED点亮时,说明蓝牙器件已与一个“主人”配对。
您可以在RN-41使用手册中获得更多有关蓝牙器件的信息。
蓝牙器件上贴有一张写有12位数字的标签,这是器件的MAC地址。您需要这个地址来识别模块并把模块连接到NAO。
Copyright © 2010 Aldebaran-Robotics - 版权所有