Destination Control
The walkTo method is a generalised implementation of walk patterns. It is a blocking function until walk process is finished. If you pCalled this function, the last command received overrides all previous commands.
Path planning
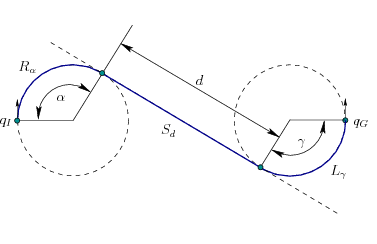
The path is chosen using one of two planners, depending on the distance of the path. If the global path distance is less than 0.4m, an SE3 Interpolation is used to compute the path. Otherwise, a dubins curve is used (see picture below), composed of two circles joined by a straight line. The circle radius is fixed at 0.1m.
Parameters
- x: the distance in meters along the X axis (forwards and backwards).
- y: the distance in meters along the Y axis (lateral motion).
- theta: the final robot orientation in radians relative to the current orientation.
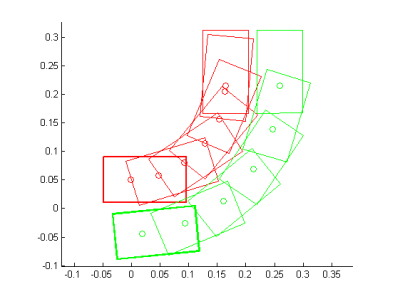
Example SE3 path
# Example showing the walkTo command. # As length of path is less than 0.4m # the path will use an SE3 interpolation # The units for this command are meters and radians x = 0.2 y = 0.2 # pi/2 anti-clockwise (90 degrees) theta = 1.5709 proxy.walkTo(x, y, theta)
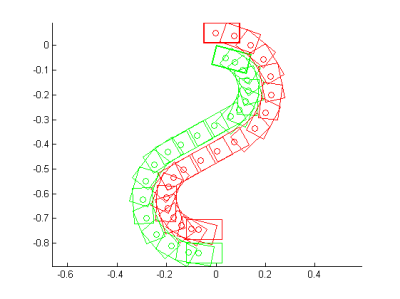
Example Dubins path
# Example showing the walkTo command # As length of path is more than 0.4m # the path will follow a dubins curve # The units for this command are meters and radians x = -0.1 y = -0.7 theta = 0.0 proxy.walkTo(x, y, theta)